رانش صندلی های چرخدار دستی
مصطفی علامی
دکتر محمد رضا سروش
حسن سماواتی
پژوهشکده مهندسی و علوم پزشکی جانبازان
پست الکترونیک برای تماس و تبادل نظر
iranassistive@gmail.com soroush46@gmail.com
چکیده
تحرک برای سلامت ، تعامل اجتماعی و بهزیستی افراد وابسته به صندلی چرخدار ، لازم و اساسی می باشد و باید به عنوان یک هدف ضروری از فرایند توانبخشی و موفقیت در برقراری مجدد تعامل اجتماعی و تأمین یک زندگی مولد و فعال آنها در نظر گرفته شود.
معمول ترین صندلی چرخدار مورد استفاده در بین کاربران صندلی های چرخدار ، صندلی های چرخدار دستی هستند که حلقه های رانش به عنوان واسط فرد/فناوری عمل می کند . رانش صندلی چرخدار با حلقه های رانش کاری بسیار تکراری است که موجب بروز آسیب و درد در اندام فوقانی و ستون فقرات فرد می شود.
بررسی رانش صندلی چرخدار دستی به دلیل رشد جمعیت استفاده کننده از صندلی چرخدار و درخواست آنها مبتنی بر داشتن وسیله حرکتی مؤثر برای حفظ کیفیت زندگی برابر با جامعه عادی ، به طور فزاینده ای اهمیت یافته است . در پرتو دانش بیومکانیکی و فیزیولوژیکی رانش صندلی چرخدار دستی نیاز به پرداختن به روش هایی بجز رانش با حلقه های رانش ، احساس می شود .
در این بررسی مروری ، ضمن بررسی و طبقه بندی صندلی های چرخدار دستی، عوامل موثر بر رانش صندلی های چرخدار دستی بررسی و عوارض ثانویه آن ذکر گردیده است.
واژگان کلیدی: رانش صندلی چرخداردستی ، تحرک
مقدمه
صندلی های چرخدار تا حدود ۱۰۰۰ سال پیش به مقدار خیلی کمی پیشرفت نموده بودند . نخستین نمونه از یک صندلی چرخدار به یک تصویر از صندلی چرخدار سه چرخ که در سال ۵۲۵ بعد از میلاد کشیده شده است بر می گردد که یک مرد چینی بر روی آن سوار می باشد .
صندلی های چرخدار تا قرن شانزدهم میلادی تغییر قابل توجهی در طراحی خود نداشته ولی از آن به بعد در قرن شانزدهم میلادی در اروپا به نحو مطلوبی توسعه یافتند .
دهه ۱۸۷۰ اولین صندلی چرخدار همگانی در ایالت متحده توزیع گردید که دارای ساختار چوبی و حجیم بوده که دو چرخ محرک بزرگ در جلو و دو چرخ کوچک در عقب داشتند . در دهه ۱۹۱۰ به جای اجزای چوبی حجیم و سنتی از لوله های فلزی استفاده شد . اولین صندلی چرخدار الکتریکی در زمان جنگ جهانی اول تولید شد . در دهه ۱۹۴۰ اولین صندلی چرخدار مکانیکی تا شو ثبت گردید و در دهه ۱۹۵۰ اولین صندلی چرخدار الکتریکی همگانی توزیع گردید .
در دهه ۱۹۷۰ اولین بار برای ساخت شاسی صندلی چرخدار از آلیاژ آلومینیوم به کار رفته در هواپیما استفاده شد و در دهه ۱۹۸۰ صندلی های چرخدار الکتریکی پیشرفت نمودند .
در دهه ۱۹۹۰ صندلی های چرخدار الکتریکی با قابلیت تا شدن همراه با جدا شدن باتری ها و جاپایی ها وارد بازار گردید . بیشتر تغییرات در طراحی صندلی های چرخدار در دهه های اخیر انجام گرفته است .
مدت کوتاهی پس از جنگ جهانی دوم دکتر لودویک گاتمن و همکارانش در بیمارستان استوک مندویل انگلستان ، صندلی های چرخدار ورزشی را به عنوان یک وسیله توانبخشی ابداع نمودند .
وی در سال ۱۹۴۸ برای معلولین جنگی رقابت هایی را برگزار نمود . در سال ۱۹۵۲ اولین رقابت های بین المللی ورزشی با صندلی چرخدار آغاز شد و فدراسیون بازی های استوک مندیل[۱] تأسیس گردید . اولین بازی های بین المللی برای افراد ناتوان جسمی در سال ۱۹۶۰ در رم همراه با بازی های المپیک برگزار گردید .
صندلی های چرخدار ورزشی و تفریحی به فرد ناتوان، تصور و بینشی جدید از خود می بخشد و از سویی دیگر نگرش و شیوه برخورد جامعه را نسبت به او تغییر می دهد . معلول می تواند درون صندلی چرخدار خود یک قهرمان باشد و در سطوح بالای ورزشی رقابت کند .
برخی مددجویان گردش و سیاحت را به ورزش های تیمی و انفرادی ترجیح می دهند و استفاده از وسیله ای که در آن دنده ها و اهرم ها نقش بیشتری داشته باشند ، برایشان جذاب است . براساس این نیاز صندلی های چرخدار پدالی توسعه یافت . در این وسایل هدف بالا نگه داشتن سرعت پدال زدن و کاهش مصرف انرژی است به گونه ای که انرژی را بطور مؤثر به حرکت تبدیل می نماید .
در کشورهای خاور دور صندلی های چرخدار پدالی مکانیکی به عنوان صندلی چرخدار اصلی معلولین مورد استفاده قرار گرفت . این نوع صندلی های چرخدار نسبت به صندلی های چرخدار مکانیکی معمولی ، دارای کارایی و سرعت بیشتری بوده ، امکان طی مسافت های طولانی تر با آنها وجود دارد و در جاده های ناصاف وسیله مؤثرتری می باشند .
روش بررسی
نوع تحقیق، بررسی مروری است .ماده اولیه در این تحقیق ، کتاب ها و مقالات مرتبط با صندلی های چرخدار دستی می باشد . جامعه مورد مطالعه صندلی های چرخدار دستی است. ضوابط ورود به مطالعه و نوع منابع انتخابی،شامل :
۱- مقالات ، کتب و ژورنال هایی که از دانشگاه های معتبر دنیا بوده و با اهداف مورد مطالعه در این پژوهش مرتبط باشد.
۲- مقالات و کتب پس از سال ۱۹۵۰ .
مطالعاتی که هدف آنها تبلیغ باشد، از مطالعه خارج شده اند. جهت رعایت اصول اخلاقی،کلیه یافته ها و نام مسئولین و پروژه های ثبت شده با صداقت کامل گردآوری می شود . در زمینه ترجمه متون نیز ، دقت لازم از جهت حفظ چهارچوب مقاله و یا text مورد نظر اعمال گردیده است .
محدودیت ها در این مطالعه شامل:
۱- فقدان بانک ها و منابع اطلاعاتی در کشور با ارتباط مستقیم با موضوع
۲- محدودیت جستجو و منابع به زبان فارسی و انگلیسی
نتایج
صندلی های چرخدار دستی
در سالیان اخیر صندلیهای چرخدار دستی با سرعت زیاد پیشرفت نموده اند. تا چند سال پیش، فقط یک مدل صندلی چرخدار دستی وجود داشت . ولی امروزه، تنوع زیادی از مدلها و رنگها برای انتخاب کردن در دسترس می باشد .
صندلیهای چرخدار از یک صندلی دارای چرخ که حداقل جابجایی را تامین مینمودند به ارتزهای پیشرفته ای جهت پاسخگویی به تقاضاهای حرکتی کاربران آنها، تبدیل شده اند[۱ ].
انواع صندلی های چرخدار دستی
صندلی های چرخدار دستی بر پایه مبانی مختلف به روش های متفاوت طبقه بندی شده اند . صندلی های چرخدار دستی براساس فرد راننده ، به دو گروه خودران[۳] و دیگر ران[۴] طبقه بندی می شوند که به اختصار توضیح داده می شود[ ۲ ، ۳] .
صندلیهای چرخدار دستی خودران
صندلیهای چرخدار خودران (توانبخشی) برای استفاده توسط یک نفر به عنوان یک وسیله حرکتی طراحی میشوند. برخی از صندلیهای چرخدار توانبخشی را میتوان با توجه به نوع کاربری آنها یا کاربران خاص آن، در یک طبقه قرار داد.
در افراد مبتلا به نقص حرکتی که یکی از اندام فوقانی آنها نیز قطع است و یا افرادی که مبتلا به اختلالات حرکتی با منشاء مغزی مبتلا می باشند ، نیاز به صندلیهای چرخداری دارند که بتوانند آن را با یک دست برانند و هدایت نمایند. صندلیهای چرخدار تک دست ران[۵] شامل یک محور رابط بین دو محور چرخ عقب هستند.
چرخ عقب این صندلیها در سمت اندام فوقانی سالم دارای دو حلقه رانش و در سمت مبتلا فاقد حلقه رانش میباشد. حلقه رانش با قطر کم تر (در سمت سالم) علاوه بر انتقال قدرت به چرخ همان طرف از طریق محور رابط بر چرخ سمت دیگر نیز اعمال نیرو مینماید و این امر باعث میشود هنگامیکه کاربر چرخ یک طرف را به حرکت در میآورد، هر دو چرخ حرکت کنند . هنگامی که کاربر قصد تغییر جهت داشته باشد، حلقه رانش با قطر کم تر را رها نموده و با استفاده از حلقه رانش اصلی چرخ سمت سالم و اعمال نیرو فقط بر همان چرخ این کار را انجام میدهد.
برخی از افرادی که در اندامهای فوقانی و تحتانی ضعف دارند میتوانند با استفاده از مجموع توان اندام فوقانی و تحتانی یا با استفاده از اندام تحتانی صندلی چرخدار را برانند. طراحی و انتخاب یک صندلی چرخدار که با پا رانده میشود[۶] عمدتاً به این که چگونه فرد میتواند بیشترین فایده را از توانایی حرکتی خود ببرد، بستگی دارد [ ۲ ].
صندلیهای چرخدار دستی دیگر ران
همه صندلیهای چرخدار توسط سرنشین آن رانده و هدایت نمیشوند و در بسیاری از بیمارستانها و آسایشگاهها، صندلیهای چرخدار توسط همراهان و مراقبین رانده میشوند.
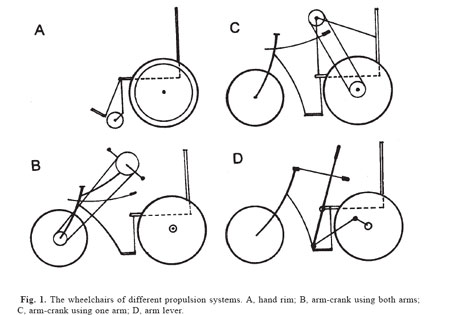
اگر صندلی کاملاً توسط همراه و بدون کمک سرنشین آن رانده شود، دیگر نیازی به چرخهای بزرگ عقب وجود نخواهد داشت (شکل ۱)[ ۳ ]. در طراحی صندلیهای چرخداری که همراه آن را میراند، میبایست هم سرنشین وهم فرد همراه را به عنوان استفادهکنندگان از صندلی مورد توجه قرار داد.سرنشین اغلب صندلیهای چرخداری که توسط همراه رانده میشود، سالمندان میباشند و گاهاً در ارتباط با استفاده کاربران سالمند[۷] ، این صندلیها را تحت عنوان ژری[۸] میشناسند [ ۱ ].
ساختار صندلی های چرخدار دستی
صندلی های چرخدار دستی دارای دو ساختار اصلی حمایتی[۹] و رانش[۱۰] می باشند که به اختصار در ذیل به آنها پرداخته می شود] ۴ [ .
ساختار حمایتی
ساختار حمایتی صندلی چرخدار شامل بدنه و ملحقات آن می باشد . سامانه های نشستنگاهی[۱۱] و موقعیت دهی[۱۲] اغلب به عنوان بخشی از ساختار حمایتی مورد توجه قرار می گیرند . لوازم فرعی بدنه ( مانند تکیه گاه دست و جاپایی ) نیز بخشی از ساختار حمایتی می باشند . در برخی از صندلی های چرخدار این لوازم فرعی با بدنه صندلی به صورت یکپارچه ساخته می شوند . برخی از ساختارهای حمایتی منحصر به فرد بوده و جهت وضعیت دهی فرد در فضا مورد استفاده قرار می گیرند[ ۴ ].
بدنه صندلی های چرخدار دستی
بدنه شامل ریل های نشستنگاه[۱۳] ، تیرهای پشتی[۱۴] و وسایل الحاق چرخها می باشد. در حال حاضر بدنههای کلیه صندلیهای چرخدار معمول، حول ساختارهای لوله ای تمرکز یافتهاند.
اغلب بدنه صندلی های چرخدار براساس ماده بکار رفته در آنها طبقه بندی می شوند . صندلی های چرخداری که بدنه آنها از استیل نوردسرد[۱۵] ساخته می شودو وزنی بین ۲۷ تا ۳۰ کیلوگرم دارند صندلی های چرخدار استاندارد(شکل۲) و نمونه هایی که از آلومینیوم یا استیل ضد زنگ[۱۶] ساخته می شوند و وزنی معادل ۱۲ تا ۱۸ کیلوگرم دارند صندلی های چرخدار سبک وزن[۱۷] (شکل۳) نامیده می شوند.
بدنه های خیلی سبک[۱۸] نوعاً از آلیاژ فلز آلومینیوم ، تیتانیوم یا مواد کامپوزیت ساخته می شوند و کمتر از ۱۰ کیلوگرم وزن دارند(شکل ۴) [ ۴ ] . بنابر مطالعه بیک من[۱۹] و همکاران ( ۱۹۹۹ ) ، استفاده از صندلی های چرخدار دستی بسیار سبک موجب افزایش بازده رانش در مقایسه با صندلی های چرخدار معمولی می شود . [ ۵ ]
استفاده از مواد کامپوزیت بر استیل یا آلومینیوم مزایای متعددی را در پی دارد . مواد کامپوزیت را می توان شکل داد که در نتیجه امکان ارائه طرح های زیباتر و جذابتری را نسبت به جوش دادن لوله های آلومینیوم یا استیل فراهم می نماید . کامپوزیت ها بادوام تر هستند و خواص آنها را می توان از نظر شکل ، استحکام و سختی[۲۰] مناسب کرد .
مواد کامپوزیت در مقایسه با فلزات ضربه[۲۱] و لرزش را به اندازه ای کمتر منتقل می کنند که این کاهش برای کاربران صندلی چرخدار محسوس می باشد .
بزرگترین مشکل این مواد قیمت بالای آنها می باشد که با افزایش حجم تولید و پیشرفت در سایر فناوری ها ( مانند تولید دوچرخه ) قیمت آنها نیز رو به کاهش می باشد . صندلی های چرخدار بسیار سبک و فعال مورد توجه کاربران فعال و با قدرت و دارای ثبات قسمت فوقانی بدن می باشد و اغلب در ورزش های با صندلی چرخدار استفاده می شوند [ ۴ ] .
بدنه صندلی های چرخدار دستی تاشو[۲۲] یا غیرتاشو)سخت( [۲۳] می باشند . نوعاً در صندلی های چرخدار تاشو از یک ساختار تاشونده دارای بار متقاطع[۲۴] (شکل ۵) استفاده می شود که امکان تا کردن آنها را هنگام حمل و نقل فراهم می نماید. مزایای بدنه های سخت عبارتند از :
– با توجه به سختی بدنه و عدم از دست رفتن انرژی در حرکات بدنه، برای رانش و مانور آسان تر هستند .
– استحکام و دوام بیشتری دارند و قطعات آنها کمتر گم می شود .
– امکان تنظیم بیشتری با توجه به وضعیت بدن کاربر مهیا می نمایند .
– اغلب جمع و جور تر هستند .
معایب بدنه های سخت عبارتند از :
– حمل و نقل آنها مشکل تر است .
– انبارداری آنها مشکل تر است .
– امکان بارگیری آنها بر روی سقف اتومبیل وجود ندارد .
– با توجه به سختی بدنه، نیروهای برشی بر بدن کاربر افزایش می یابد .
مزایای بدنه های تاشو عبارتند از :
– حمل و نقل و بارگیری آنها در خودرو آسان تر است .
– برای نگهداری به جای کمتری نیاز دارد .
– با توجه به انعطاف پذیری بدنه،بخشی از شوک ها و ضربه های وارده را جذب می کنند .
معایب این بدنه ها عبارتند از :
– با توجه به از دست رفتن انرژی در حرکات بدنه، رانش آنها مشکل تر است .
– با توجه به وجود مکانیزم ضربدری ، سنگین تر هستند .
– قطعات بیشتری داشته در نتیجه به نگهداری بیشتری نیاز دارند .
– تثبیت تنظیم صندلی چرخدار و نیز اصلاح آن بسیار مشکل تر است .
– امکان تطابق کمتری با کاربران دارند[ ۶ ] .
تکیه گاه های دست[۲۵]
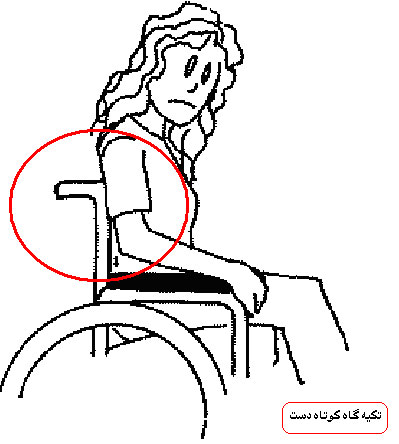
تکیه گاه های دست صندلی های چرخدار معمولی ممکن است بخشی ثابت از بدنه و یا از انواع چرخنده به عقب[۲۶] یا جداشونده باشند . تکیه گاه های دست براساس طول بالشتک آن ها در دو نوع ارائه می شوند . طول بالشتک تکیه گاه های دسته میزی[۲۷] کوتاهتر هستند و به کاربر اجازه می دهند که به میز ( تحریر ، غذا و … ) نزدیک تر شود . طول بالشتک تکیه گاه های دست بلند[۲۸] تا جلوی ریلها نشستنگاه کشیده شده و تکیه گاه بلندتری را فراهم می کنند .
ارتفاع تکیه گاه دست می تواند ثابت یا قابل تنظیم باشد . بالشتک تکیه گاه های دست قابل تنظیم در ارتفاع ، امکان تطابق ارتفاع تکیه گاه دست با ارتفاع تنه فرد و تهیه میزان مناسب حمایت از بازوها را فراهم می نماید . قرارگیری یک محافظ در زیر تکیه گاه دست از ساییده شدن لباس و بدن کاربر توسط چرخهای عقب جلوگیری می کند[ ۱ ] .
تکیه گاه های ساق
تکیه گاه های ساق[۲۹])شکل ۶) و جاپایی ها[۳۰] از ساق ها و پاها حمایت می کنند و این دو همراه با هم، اغلب به عنوان اسباب جلویی[۳۱] صندلی چرخدار نام برده می شوند . تکیه گاه های ساق ممکن است ثابت ( به صورت یکپارچه با بدنه ) و یا جدا شدنی ( چرخنده به بیرون[۳۲] ) باشند . نوع چرخنده به بیرون جابجایی به و از صندلی چرخدار را آسانتر می نمایند[ ۱ ] .
جاپایی ها به تکیه گاه های ساق متصل هستند و اغلب ارتفاع آنها جهت تطابق با طول ساق فرد، قابل تنظیم می باشد . در برخی انواع، زاویه جاپایی نیز جهت تطابق با زاویه مفصل مچ فرد قابل تنظیم می باشد . با توجه به اینکه تکیه گاه های ساق و جاپایی ها تکیه گاه و حمایت مورد نیاز اندام های تحتانی را فراهم می کنند ، تنظیم صحیح آنها ضرورت دارد[ ۱ ] .
ترمز[۳۳]
یکی از اجزایی که در صندلی های چرخدار معمولی مورد استفاده قرار می گیرد ترمزها می باشند. ترمز چرخ به عنوان ترمز توقف یا پارک عمل مینماید و هنگام جابجایی از روی صندلی چرخدار بر روی سطح دیگر یا زمانی که کاربر مایل است در مکانی خاص توقف نماید، استفاده میشود. با استفاده ترمزها، کاربر میتواند به اشیاء دیگر فشار وارد کند و در زمان دلخواه، ثبات بیشتری داشته باشد. ترمزها در انواع مختلف ارائه میشوند و در محل های مختلف صندلی چرخدار نصب می شوند[ ۱] .
دسته های رانش[۳۴]
دسته های رانش امکان راندن صندلی را از عقب برای فرد همراه امکان پذیر می سازند[ ۱ ] .
وسایل ضد واژگونی
وسایل ضد واژگونی[۳۵] ثبات صندلی را افزایش می دهند و بنا به نیاز در جلو یا عقب یا هر دو سمت نصب می شوند و در هنگام تغییر جهت بردار وزن ، از واژگونی صندلی جلوگیری می کنند . استفاده از این وسایل به ویژه در صندلی های چرخداری که به سامانه های تکیه گاه پشتی خم شونده به عقب (reclining) و نشستنگاه خم شونده به عقب tilt-in-space مجهز شده اند اهمیت دارد .این وسایل ،ثابت یا قابل جدا شدن هستند . مزیت انواع جدا شدنی در امکان جدا کردن یا بالا بردن آنها جهت پیشگیری از مزاحمت آنها در هنگام عبور از جدول خیابانها یا مسیرهای ناهموار می باشد[ ۱] .
مبلمان[۳۶]
مبلمان نشستنگاه و تکیه گاه پشتی )شکل ۷)معمولاً از جنس پارچه می باشد که به بدنه متصل می شوند . اصلی ترین مزیت استفاده از مبلمان های پارچه ای، سبک بودن و قابلیت تا شدن آنها می باشد که حمل و نقل صندلی چرخدار را آسان می کنند[ ۱] .
ساختار رانش
ساختار رانش در صندلی های چرخدار دستی شامل دو قسمت اصلی می باشد :
۱- چرخها
۲- واسط ] ۲ [
چرخ ها
چرخهای عقب
چرخهای عقب بر دو نوع اصلی هستند . چرخ های سیمی[۳۷] ،دارای پره های فلزی می باشند که محیط طوقه را به توپی چرخ متصل می کنند . چرخ های پرسی[۳۸] از مواد سخت یا کامپوزیت ساخته می شوند .پیش تر این چرخ ها از منیزیوم[۳۹] ساخته می شدند واز آن ها به عنوان چرخ های مگ[۴۰] نام برده می شد . مدل های جدیدتر از آلومینیوم ، نایلون یا مواد کامپوزیت پلاستیکی ساخته می شوند[ ۱ ] .
چرخ های پرسی نیاز به نگهداری کمتری دارند ولی از آنجا که چرخ های پره ای سبک تر هستند بیشتر مورد استقبال کاربران صندلی های چرخدار فعال قرار گرفته اند[ ۲ ] .
قطر چرخ ها از ۴۶ تا ۶۶ سانتی متر متغیر است . صندلی های چرخدار الکتریکی معمولاً دارای چرخ هایی با قطر ۴۶ سانتی متر و انواع دستی معمولی چرخ های ۶۰ سانتی متری دارند[ ۲ ] .
میزان چرخش چرخ ها به صورت راحت و بدون لرزش و تکان تحت عنوان راستی[۴۱] بررسی می شود. راستی چرخ های سیمی به تنظیم کشش پره های چرخ بستگی دارد و باید حداقل سالیانه یکبار برای استفاده معمولی، کنترل شوند . راستی چرخ های مگ در هنگام تولید ثابت شده اند و ثابت باقی می مانند مگر آنکه در معرض دمای بالا یا ضربه قرار بگیرند . تنظیم چرخ ها[۴۲] بر سهولت رانش صندلی چرخدار تأثیر دارند . مقصود از تنظیم چرخ ها میزان موازی بودن دو چرخ با یکدیگر می باشد . در صورتیکه چرخها موازی نباشند ، مقاومت غلتشی آنها در صندلی چرخدار افزایش می یابد[ ۲] .
در صندلی های چرخدار بسیار سبک وسبک امکان نصب محور چرخ های عقب در موقعیت های مختلف نسبت به بدنه وجود دارد که تنوع در عمل رانش را امکان پذیر می سازد .
با بردن محور چرخ های عقب به سمت جلو ، فاصله محور چرخ های عقب با محور چرخک های جلو صندلی چرخدار[۴۳] کاهش و قدرت مانور آن افزایش می یابد و در مقابل امکان واژگونی به عقب صندلی چرخدار افزایش می یابد .
نصب محورچرخ های عقب در موقعیت های خلفی تر ، موجب افزایش پایداری صندلی چرخدار می شود . حرکت محورهای چرخ های عقب به بالا موجب پایین آمدن نشستنگاه و در نتیجه مرکز ثقل می شود و پایداری صندلی چرخدار را افزایش می دهد .
در این شرایط با هر ضربه نیروی جلوبرنده قوی تر خواهد بود . به وضعیتی که محورهای چرخ های عقب به گونه ای نصب شوند که بالای چرخ های عقب به سمت بدنه صندلی چرخدار به یک میزان نزدیک شوند ، کمبر[۴۴] گفته می شود که موجب افزایش سطح اتکاء صندلی چرخدار بر روی زمین می شود . استفاده از پین های سریع آزاد کننده[۴۵] ، امکان جداکردن چرخ ها در هنگام حمل و نقل را فراهم می نماید[ ۱ ].
دو نوع لاستیک چرخ در صندلی های چرخدار استفاده می شود : بادی[۴۶] و توپر[۴۷] . لاستیک های بادی معمولاً دارای یک تیوپ داخلی قابل تعمیر می باشند .
این لاستیک ها رانشی آسانتر ، سواری با لرزش کمتر و مانور بیشتری را فراهم می کنند . آنها سبک ترین نوع لاستیک ها بوده و حداقل وزن را به کل صندلی چرخدار تحمیل می کنند . بزرگترین عیب آنها ، پنچر شدن و نگهداری سخت آنها می باشد و فشار هوای داخلی آنها باید به صورت مداوم کنترل شود . [ ۶ ]
بنابر مطالعه ساواتزکی[۴۸] و همکاران ( ۲۰۰۴ ) ، لاستیک های توپر عملکردی بدتر از لاستیک های بادی حتی در مواقعی که باد لاستیک های بادی تا ۲۵ درصد کاهش یافته باشد دارند و در واقع مزایای لاستیک های بادی بسیار بیشتر از مزایای لاستیک های توپر ( هزینه پایین تر و نیاز به تعمیر و نگهداری حداقل ) برای کاربران صندلی های چرخدار دستی می باشد . در لاستیک های بادی در صورتی مصرف انرژی به صورت آشکار اضافه می شود که باد آنها تا ۵۰ درصد کاهش یافته باشد [ ۷] .
لاستیک های توپر در سه نوع نیمه بادی[۴۹] ، اسفنجی[۵۰] و سخت[۵۱] ارائه می شوند . برخی تولید کنندگان این لاستیک ها را لاستیک های ضد پنچری[۵۲] می نامند . لاستیک های نیمه بادی شامل یک لاستیک سخت با ساختار پلاستیکی می باشند که یک حلقه فلزی از مرکز آنها می گذرد .
کارایی این لاستیک ها از سایر نمونه ها به لاستیک های بادی نزدیک تر بوده و دارای مقاومت غلتشی کم و تا حدودی دارای خاصیت ضربه گیری[۵۳] می باشند . لاستیک های اسفنجی به جای هوا با اسفنج پر شده اند و کارایی بهتری از لاستیک های جامد دارند . لاستیک های جامد با دوام ترین و ارزان ترین و در مقابل سنگین ترین نوع لاستیک ها هستند که مقاومت غلتشی بیشتری نیز ایجاد می کنند . هیچ کدام ازانواع لاستیک های توپر پنچر نمی شوند . انتخاب نوع لاستیک براساس نیاز کاربر ، زمینه استفاده و میزان دسترسی به خدمات تعمیر و نگهداری معین می شود [ ۲ ] .
چرخک ها[۵۴]
چرخ های جلو در صندلی های چرخدار، چرخک نامیده می شوند . قطر متوسط چرخک ها از ۵۰ تا ۲۰۰ میلی متر متفاوت می باشد. چرخک های بادی حرکت نرم تری را فراهم می کنند ولی به نگهداری بیشتری نیاز دارند . در صندلی های چرخدار بسیار سبک ، از چرخک های از جنس پلی اورتان[۵۵] استفاده می شود . از جمله مهمترین مشکلات چرخک ها لرزش[۵۶] در آنها می باشد . این لرزش هنگام هل دادن سریع یک گاری خرید توسط خریداران تجربه می شود . چرخک های کوچکتر لرزش کمتری ایجاد می کنند و در مقابل چرخک های بزرگتر ، حرکت نرم تری را فراهم نموده ودر عوارض مسیرهای ناهموار کمتر گیر می کنند ] ۱ [ .
واسط فرد/ فناوری[۵۷]
واسط فرد/ فناوری در صندلی های چرخدار دستی معمولاً حلقه ای است که به چرخ متصل می باشد و حلقه رانش[۵۸]نامیده می شود .
حلقههای رانش، حلقههای فلزی یا پلاستیکی هستند که به چرخهای رانش (یعنی چرخهای عقب) متصل میشوند و برای راندن و هدایت یک صندلی چرخدار دستی به کار میروند.
حلقههای پلاستیکی اغلب در صندلیهای چرخدار ارزان استفاده میشوند. حلقه رانش در صندلی های چرخدار معمولی از استیل نورد سرد و آب کروم کاری شده و در صندلی های چرخدار سبک و بسیار سبک ، از آلومینیوم ساخته می شوند و اغلب پوششی از وینیل یا لاستیک متخلخل (فوم) بر روی آن کشیده می شود .
فوم به عنوان روکش حلقه رانش دوام چندانی ندارد و بجز برای افرادی که دست آنها عملکرد خیلی ضعیفی دارد یا در اندام فوقانی درد شدید دارند، به ندرت استفاده میشود. حلقههای رانش با روکش وینیل در جهت افزایش اصطکاک بین دست و حلقه رانش کاملاً مفیدند و به کاهش نیروی لازم جهت راندن صندلی ،کمک میکنند.
نقص عمده روکش وینیل این است که درهنگام پایین آمدن از یک شیب،با افزایش اصطکاک موجب ایجاد گرما میشود . وینیل در توزیع و پخش گرما، بسیار ضعیف عمل میکند. اندازه حلقه رانش بر رانش صندلی چرخدار تأثیر دارد . حلقه های رانش کوچکتر مشابه دنده بالا[۵۹] در دوچرخه، نیاز به قدرت بیشتری برای شروع حرکت دارند ولی دستیابی به سرعت در حین رانش را آسانتر می نمایند و در مقابل حلقه های رانش بزرگتر مشابه دنده پایین در دوچرخه ، شروع حرکت را تسهیل می کنند ولی در حفظ سرعت بالا ،به کار و تلاش بیشتری نیاز دارند .
در افرادی که در گرفتن حلقه های رانش مشکل دارند می توان از الحاق تکمه یا برجستگی هایی که به این منظور طراحی شده اند استفاده کرد .
استفاده از حلقههای رانش دارای برجستگی برای کاربرانی که عملکرد دستهایشان بسیار ضعیف است، مفید میباشد. برجستگیها، نیاز به ایجاد اصطکاک برای راندن صندلی چرخدار را برطرف مینمایند ولی با توجه به اینکه اعمال نیرو بر حلقه رانش را به محیطهایی که برجستگیها قرار گرفته اند محدود می کنند، استفاده از حلقه رانش را مشکل مینمایند .
در سرعتهای بالاتر، ضربه زدن به این برجستگیها ، بسیار مشکل تر میشود و علاوه بر آن این برجستگیها ، قدرت مانور صندلی چرخدار را کاهش میدهند . برخی کاربران جهت بهتر گرفتن حلقه های رانش و محافظت از دستهای خود از دستکش استفاده می کنند [۱،۲،۴،۶ ] .
قطر لوله حلقههای رانش نیز متغیر است. در اغلب صندلیهای چرخدار دستی از لولههای با قطر یک سانتی متر استفاده میشود. این قطر از نظر تولید کنندگان صندلی چرخدار مناسب و مقرون به صرفه است و به همین دلیل از آن به عنوان یک استاندارد غیر رسمی[۶۰] استفاده میشود، هر چند بنا به سفارش مشتری قطرهای بزرگ تر نیز ارایه میگردد.
قطرهای بزرگ تر لوله حلقه رانش (حداکثر تا دو و نیم سانتی متر ) میتواند گرفتن حلقه رانش توسط دست و وارد کردن نیرو بر آن را آسان تر نماید. برای برخی افراد ، قطر بزرگ تر حلقه رانش در صورتی که سایر جایگزینها غیر عمل باشند، مورد توجه قرار میگیرد [ ۱ ] .
در صورتیکه کاربر فقط قادر به استفاده از یک دست باشد ، دو حلقه رانش در سمت سالم نصب می شوند و با استفاده از یک محور، ارتباط بین حلقه درونی و چرخ سمت مقابل برقرار می شود .
کاربر با گرفتن هر دو حلقه رانش و اعمال نیرو بر آنها صندلی چرخدار را به جلو می راند و با استفاده از یک حلقه رانش به طرفین می چرخد .
در نوع اهرمی کاربر برای راندن صندلی چرخدار بر یک اهرم با استفاده از دست سالم نیرو به سمت جلو و عقب وارد می کند که صندلی چرخدار یک دستی[۶۱] نامیده می شود . استفاده از هر یک از دو مکانیسم مذکور به وجود مقدار مناسب از هماهنگی و قدرت کاربر بستگی دارد و فرد می باید نسبت به امکان پذیری[۶۲] استفاده از آنها مورد ارزیابی قرار گیرد[ ۱ ] .
در شکل۸ انواعی از رانش صندلی های چرخ دار دستی با واسط های متفاوت فرد/فناوری نشان داده شده است.
رانش صندلی های چرخ دار
برای پاسخ به نیازهای متفاوت افراد با اختلالات حرکتی ، سه طبقه گسترده از سامانه های حرکتی چرخدار
( صندلی چرخدار ) وجود دارد :
– سامانه حرکتی وابسته[۶۳]
– سامانه حرکتی مستقل دستی[۶۴]
– سامانه حرکتی مستقل الکتریکی[۶۵]
سامانه های حرکتی وابسته توسط فرد همراه رانده می شوند و زمانی انتخاب می شوند که :
۱- فرد هرگز نتواند صندلی چرخدار را به صورت مستقل براند ( مانند افراد مبتلا به کمبودهای ادراکی ، شناختی یا رفتاری )
۲- در شرایطی که به یک سامانه ثانویه که سبک تر است و حمل و نقل آن آسان تر می باشد نیاز وجود دارد
( مانند جابجایی بیماران در فرودگاه )
تأمین قدرت مورد نیاز جهت رانش ، هدایت و کنترل این سامانه ها یا به صورت مستقل توسط فرد همراه صورت می پذیرد و یا رانش و هدایت صندلی چرخدار با استفاده از نیروی الکتریکی انجام می شود و فرد همراه فقط کنترل صندلی چرخدار را بر عهده دارد .
سامانه حرکتی مستقل دستی در افرادی کاربرد دارد که توانایی راندن صندلی چرخدار را به صورت دستی دارا می باشند . این سامانه ها دارای دو چرخ بزرگ در عقب و دو چرخ کوچک در جلو هستند و این امکان را برای فرد فراهم می نمایند که آن را به صورت مستقل براند .
سامانه های حرکتی الکتریکی مستقل زمانی ضرورت می یابند که فرد در راندن صندلی چرخدار دستی مشکل داشته باشد . این سامانه ها ، صندلی های چرخدار موتورداری می باشند که توسط کاربر رانده می شوند .[ ۱،۸]
به طور خلاصه می توان بر مبنای نوع تأمین قدرت مورد نیاز برای رانش ، صندلی های چرخدار را در انواع زیر طبقه بندی نمود :
الف – صندلی های چرخدار دستی که توسط سرنشین آن با بهره گیری از توان فیزیکی خود رانده ، هدایت و کنترل می شوند .
این صندلی های چرخدار دستی به یکی از سه روش زیر رانده می شود :
الف- با یک دست
ب- با دو دست
ج- با پاها [ ۴،۵ ]
ب- صندلی های چرخدار دستی که توسط فرد همراه با بهره گیری از توان فیزیکی او رانده ، هدایت و کنترل می شوند . ( سرنشین صندلی چرخدار به این منظور انرژی مصرف نمی کند )
پ- صندلی های چرخدار الکتریکی که توسط سرنشین آن با بهره گیری از توان الکتریکی رانده ، هدایت و کنترل می شوند .
ت- صندلی های چرخدار الکتریکی که توسط فرد همراه با بهره گیری از توان الکتریکی رانده ، هدایت و کنترل می شوند .
ث-اسکوتر ها که توسط سرنشین با بهره گیری از توان الکتریکی رانده ، ولی هدایت و کنترل وسیله با استفاده از توان فیزیکی او انجام می شود [ ۹ ].
در پیوست ۲ مزایا و معایب صندلی های چرخدار دستی،الکتریکی واسکوتر ها با هم مقایسه شده اند.
رانش صندلی چرخدار دستی
کاربران صندلی های چرخدار دستی به جای اندام های تحتانی از اندام های فوقانی خود برای تحرک استفاده می نمایند . دست ها در مقایسه با پاها ، کارایی کمتری دارند و آسیب پذیرتر می باشند و در نتیجه ، ظرفیت فیزیکی کمتری فراهم نموده و همراه با خط ابتلا به مشکلات استفاده بیش از حد می باشند . این مشکلات علاوه بر درد و عدم راحتی شامل ابتلا به سبک زندگی غیرفعال نیز می باشد که خود می تواند موجب بروز عوارض ثانویه ای چون چاقی ، دیابت و مشکلات قلبی عروقی شود .
تأثیر ساختار حمایتی صندلی چرخدار در رانش صندلی چرخدار دستی
بررسی تأثیر ساختار حمایتی بر بیومکانیک رانش، به ویژه در سی سال اخیر مورد توجه قرار گرفته است . بروبیکر[۶۶] ( ۱۹۸۶ ) ذکر نموده است که بازده رانش[۶۷] به طور چشمگیری تحت تأثیر وضعیت نشستن کاربر بر روی صندلی چرخدار دستی قرار دارد . تغییر در وضعیت نشستنگاه برزمان ضربه ، زمان بازیافت و زاویه ضربه تأثیر دارد.[ ۱۰ ]
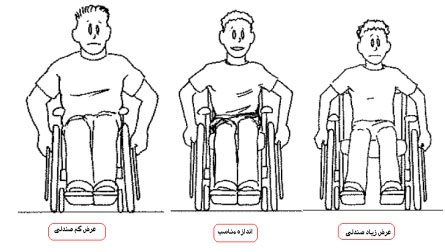
عدم تطابق ابعاد و اندازه های صندلی های چرخدار با کاربران آنها در کارایی صندلی چرخدار تأثیر منفی بر جای گذاشته و در برخی موارد می تواند موجب آسیب در فرد شود . بخشی از این مشکل می تواند به چگونگی ارتباط دادن ابعاد فرد با ابعاد صندلی چرخدار باز گردد .
عرض کم تکیه گاه پشتی صندلی چرخدار موجب عدم راحتی فرد می شود و عرض زیاد آن بر توانایی رانش کاربر اثر منفی می گذارد . چنانچه فاصله بین دو تکیه گاه دست زیاد باشد ، کاربر مجبور خواهد بود تا برای قرار گرفتن حلقه های رانش ، بازوهای خود را در وضعیت خم شده به جلو[۶۸] قرار دهد . در این شرایط ، حلقه زدن و راندن صندلی چرخدار به جلو توس ط کاربر ، شبیه به بال زدن جوجه[۶۹] خواهد بود .
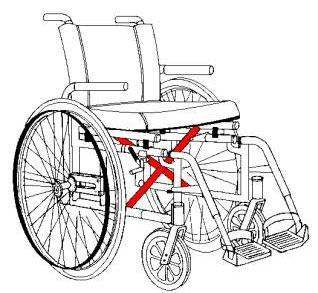
در صندلی های چرخدار دستی اختلاف بیش از ۳ سانتی متر ، بین عرض نشستنگاه صندلی با عرض لگن ، اثر منفی بر بیومکانیک ضربه[۷۰] ( اعمال نیرو بر حلقه های رانش ) دارد .
هر چه عرض نشستنگاه صندلی چرخدار کمتر باشد ، عرض کلی صندلی چرخدار کمتر شده، دسترسی به ساختمانها و فضاهای محدود افزایش می یابد .
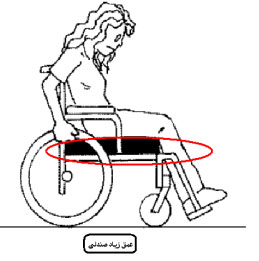
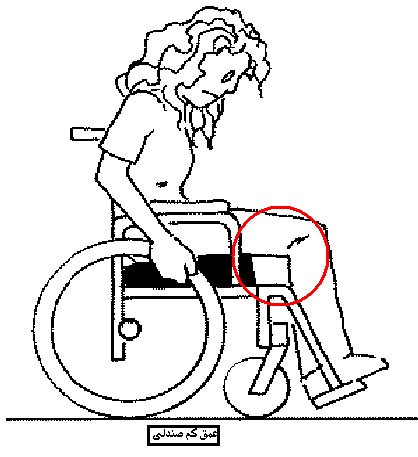
همچنین عرض کمتر نشستنگاه صندلی چرخدار ، چرخهای عقب را در وضعیت مطلوب تری نسبت به دستان کاربر قرار داده ، موجب افزایش بازده رانش صندلی چرخدار و کاهش خطر ابتلا به درد و جراحت ناشی از استفاده طولانی مدت از صندلی چرخدار می شود(شکل های ۹و۱۰و۱۱و۱۲و۱۳) .وزن صندلی چرخدار بر تحرک کاربر آن تأثیر می گذارد . به طور کلی ، هر چه وزن صندلی چرخدار کمتر باشد ، بهتر است . وزن کم صندلی چرخدار، راندن ، بارگیری و عبور از موانع را تسهیل می کند . [ ۳،۱ ]
راجرز[۷۱] و همکاران ( ۲۰۰۰ ) در مطالعه ای با هدف مقایسه تأثیر سبک رانش صندلی چرخدار دستی که در آن کاربر در وضعیت flexion تنه قرار دارد با وضعیتی که تنه در وضعیت خنثی می باشد به این نتیجه رسیدند که وضعیت flexion تنه در حین رانش می تواند منجر به آسیب به اندام فوقانی کاربران گردیده و بر کارایی فیزیکی و کیفیت زندگی آنان تأثیر بگذارد [ ۱۱ ].
بنابرمطالعه ریشتر[۷۲] ( ۲۰۰۱ ) تغییر موقعیت نشستنگاه[۷۳] کاربر بر روی صندلی چرخدار با تغییر طول بردار بین مرکز چرخ عقب با شانه های کاربر به صورت مستقیم بر زاویه رانش[۷۴] تأثیر دارد . کاهش این فاصله موجب افزایش زاویه رانش ، کاهش بسامد ضربه ، کاهش گشتاور شانه و افزایش گشتاور باز شدن[۷۵] آرنج می شود[ ۱۲].
آیسائو[۷۶] و همکاران ( ۲۰۰۲ ) در مطالعه ای تحت عنوان « بیومکانیک رانش صندلی چرخدار دستی در سالمندان : زوایای tilt و recline » به این نتیجه رسیدند که خم کردن به عقب نشستنگاه صندلی چرخدار تا ۱۰ درجه زاویه tilting و خم کردن به عقب تکیه گاه پشتی صندلی چرخدار به میزان ۱۰ درجه موجب افزایش قابل ملاحظه راندمان مکانیکی فرد تا ۱۰ درصد می شود . تأثیر زاویه tilt در افزایش راندمان مکانیکی به طور قابل ملاحظه ای بیشتر از زاویه recline بدست آمد[ ۱۳ ].
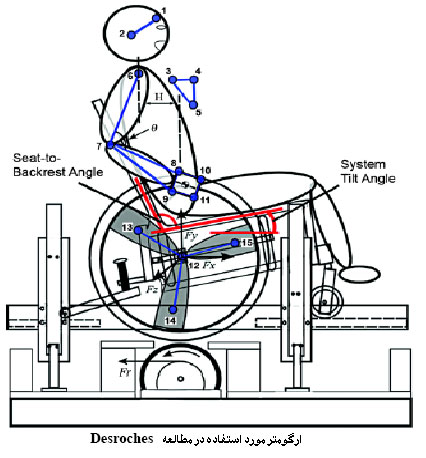
هر چند بنابر مطالعه دسروچس[۷۷] و همکاران با استفاده از ارگومتر ( شکل ۱۴ ) ( ۲۰۰۶ ) تغییر زاویه نشستنگاه ( به صورت title یا recline ) با ثابت نگهداشتن موقعیت محور چرخ عقب نسبت به شانه کاربر ، بر میزان بار[۷۸] وارده بر شانه کاربر ، تأثیر معنی داری ندارد و بر این اساس می توان زاویه نشستنگاه صندلی چرخدار را براساس راحتی کاربر و مدیریت توزیع فشار بین سطح تماس نشیمنگاه کاربر و نشستنگاه صندلی چرخدار ( جهت پیشگیری از بروز زخم فشاری ) تعیین و تنظیم نمود . [۱۴ ]
تریولو[۷۹] و همکاران در طی مطالعه ای با هدف بررسی تأثیر تحریک عضلات باز کننده کمری[۸۰] از طریق FES بر بیومکانیک رانش به این نتیجه رسیدند که ثبات دهی تنه با استفاده از FES موجب بهبود رانش صندلی چرخدار دستی می شود . فعال کردن عضلات پشت ، امکان خم شدن به جلو را برای کاربر مهیا نموده ، در نتیجه موجب افزایش نیروهای مؤثر مکانیکی می شود . [ ۱۵ ]
کاتاجاروی[۸۱] و همکاران ( ۲۰۰۴ ) در مطالعه ای با هدف بررسی تأثیر موقعیت نشستنگاه بر بیومکانیک حلقه رانش به این نتیجه رسیدند که فاصله کمتر بین محور چرخ های عقب با شانه های کاربر صندلی چرخدار موجب بهبود زمان ضربه[۸۲] و متغیرهای واقع در صفحه پیشانی می شود و نیروهای محوری و شعاعی در وضعیت فوق حداکثر می باشد . [ ۱۶ ]
تأثیر ساختار رانش بر رانش صندلی چرخدار دستی
ساختار رانش شامل چرخ ها ، چرخک ها و واسط فرد/فناوری می باشد . این اجزاء در طرح ها و ساختارهای متفاوت با توجه به فرد کاربر ، زمینه مورد استفاده و فعالیت مورد نظر ( چون راندن صندلی چرخدار دستی به عنوان یک مسابقه ورزشی یا جهت انجام فعالیت های روزمره ) طراحی ، ساخته و ارائه می شود .
علاوه بر تأثیر این اجزاء ساختاری بر رانش صندلی چرخدار دستی، نحوه ترکیب و تنظیم این اجزاء نیز بر رانش صندلی چرخدار دستی تأثیر به سزایی دارد .
چرخ ها و چرخک ها امکان رانش صندلی چرخدار را فراهم می نمایند . مقصود از چرخ ها در صندلی های چرخدار دستی خودران ، چرخ های بزرگ عقب می باشد که تحت عنوان چرخ های رانش[۸۳] نیز از آنها نام برده می شود و چرخک ها ، چرخ های کوچک جلو می باشند که چرخ های هدایت[۸۴] نیز نامیده می شوند .
در این نوع از صندلی های چرخدار اعمال نیرو از طریق واسط ( معمولاً حلقه های رانش ) بر چرخ ها صورت می پذیرد که موجب رانش صندلی چرخدار می شود و با توجه به میزان تفاوت نیروی وارده بر چرخ های سمت چپ و راست کاربر ، چرخک ها با چرخش محور دوشاخه خود در صفحه افقی ، هدایت ( مانور و چرخش به طرفین ) صندلی چرخدار را تسهیل می نمایند .
در صندلی های چرخدار دیگرران معمولاً اعمال نیرو از طریق فرد همراه بر دسته های رانش از طرف پشت بر صندلی چرخدار صورت می پذیرد . در این نوع ، دسته های رانش به عنوان واسط فرد/فناوری عمل می نمایند و در صورتی که سرنشین صندلی چرخدار فقط توسط فرد همراه رانده شود نیازی به وجود چرخ های بزرگ عقب نخواهد بود و استفاده از چرخ های عقب با قطر کمتر رانش و مانور صندلی چرخدار را آسانتر خواهد نمود .
ویژگی های مختلف چرخ ها و چرخک ها از جمله ویژگی های لاستیک آنها ، نصب و تنظیم آنها ، قطر ، جنس ، و نوع آنها و کمبر چرخ های عقب بر کیفیت و کارایی رانش صندلی چرخدار دستی تأثیر دارد که به برخی از آنها در بخش ساختار رانش اشاره شده است . بونینگر[۸۵] و همکارانش ( ۲۰۰۰ ) طی مطالعه ای با هدف تعیین اثر موقعیت محور چرخ عقب نسبت به شانه بر بیومکانیک رانش نتیجه گرفتند که :
– موقعیت محور چرخ عقب نسبت به شانه در صفحه افقی به صورت آشکاری با بسامد رانش و نرخ صعود برآیند نیرو ارتباط دارد .
– موقعیت محور چرخ عقب نسبت به شانه ، هم در صفحه افقی و هم در صفحه قائم به صورت معنی دار با زاویه ضربه[۸۶] در سرعت های متفاوت ارتباط دارد .
ایشان استنتاج کردند که موقعیت محور چرخ عقب نسبت به شانه کاربر با صدمات عصب median ارتباط دارد و تحویل و تنظیم صندلی چرخداری که امکان تنظیم محور چرخ های عقب آن با توجه به شرایط کاربر را دارا باشد ، موجب بهبود بیومکانیک رانش و کاهش احتمال خطر ابتلا به صدمه می گردد . [ ۱۷ ]
تأثیر اجزاء نرم افزاری فناوری صندلی های چرخدار دستی در رانش آنها
کیفیت رانش صندلی چرخدار دستی و آگاهی کاربر آن به روش های کارا در این زمینه و عمل به آنها در کارایی رانش صندلی چرخدار تأثیر دارد .
با هدف طبقه بندی الگوهای ضربه[۸۷] کاربران صندلی چرخدار دستی و تعیین بیومکانیک الگوهای متفاوت ، بونینگر و همکاران ( ۲۰۰۳ ) مطالعه ای را در دانشگاه پیتزبورگ انجام دادند و دریافتند :
– معمول ترین الگوی مورد استفاده در کاربران در فاز بازیابی، بالا آوردن دست ها در بالای حلقه رانش می باشد .
– الگوی ضربه مستقل از موقعیت محور چرخ عقب است و در سمت چپ و راست و در سرعت های مختلف ، متفاوت می باشد .
– بین الگوهای ضربه در آهنگ و زمان ضربه به زمان فاز بازیابی ، تفاوت های معناداری وجود دارد .
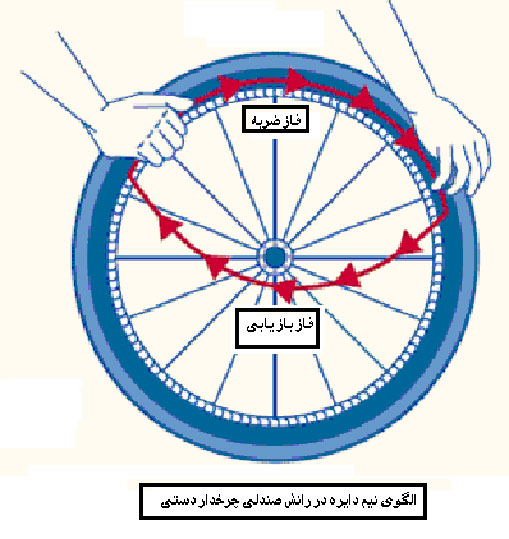
– در الگوهای ضربه ای که مسیر نیم دایره ای دارد و دست ها در خلال فاز بازیابی در پایین حلقه های رانش قرار دارند ، آهنگ ضربه پایین تر و زمان صرف شده در فاز ضربه به فاز بازیابی بیشتر است . ایشان نتیجه گرفتند :
– الگوهای نیم دایره در رانش صندلی چرخدار شکل( ۱۵) توأم با کاهش تکرار و رانش مؤثرتر می باشد و استفاده از این سبک می تواند موجب کاهش صدمه به اندام فوقانی شود .
– متخصصین بالینی می باید به مهارت آموزی کابران صندلی های چرخدار در سبک رانش توجه نمایند . [ ۱۸ ]
هونگ ون[۸۸] و همکاران در مطالعه ای به مقایسه عوامل سینماتیک و سینتیک در دو تکنیک متفاوت رانش ( push-pull و pumping ) پرداختند و به نتایج زیر رسیدند :
– حداکثر بازده مکانیکی به صورت معنی دار در تکنیک push-pull بیشتر از تکنیک pumping می باشد . این تفاوت در میانگین بازده مکانیکی معنی دار نبود .
– دامنه حرکتی مفاصل ( بجز چرخش تنه ) در دو تکنیک مزبور تفاوت معنی دار داشتند .
– استفاده از تکنیک pumping موجب افزایش بار بر اندام فوقانی می شود که منجر به افزایش خطر ابتلا به آسیب اندام فوقانی می شود هر چند بازده مکانیکی رانش را افزایش نمی دهد .
ایشان در خاتمه ذکر نمودند که استفاده از تکنیک pumping برای کاربران جدید صندلی چرخدار مناسب نمی باشد . [ ۱۹ ]
بنابر مطالعه بونینگر و همکاران ( ۲۰۰۳ ) که با هدف بررسی ارتباط بین نیروهای وارده بر حلقه های رانش و پیشرفت آسیب های شانه در کاربران صندلی های چرخدار دستی انجام شد ، احتمال خطر ابتلا به آسیب های شانه با بزرگتر شدن نیروهای وارد بر حلقه های رانش افزایش می یافت . نویسندگان این مطالعه پیشنهاد نمودند تا متخصصین به کاربران تکنیک های مؤثر رانش را آموزش دهند تا با کاهش مقدار نیروهای وارده، امکان آسیب به شانه کاهش یابد . [ ۲۰ ]
بنابر مطالعه بونینگر و همکاران ( ۲۰۰۴ ) ، عملکرد عصب median و ulnar در کاربران صندلی چرخداری که دامنه حرکتی مفصل مچ آنها در حین رانش صندلی چرخدار دستی بیشتر است بهتر است . این کاربران نیروی کمتری بر حلقه های رانش اعمال می نمایند و تعداد ضربه های وارده بر حلقه های رانش در آنان نیز کمتر است لذا در شیوه رانشی که در آنها طول زمانی فاز ضربه بیشتر و ضربه ها به صورت آرام و یکنواخت وارد می شود ، امکان صدمه ندیدن عصب فوق بیشتر است . [ ۲۲ ]
راجرز و همکاران ( ۲۰۰۱ ) با هدف مقایسه ویژگی های بیومکانیکی و فیزیولوژیکی رانش صندلی چرخدار در پیش و پس از مهارت آموزی[۸۹] در کاربران صندلی چرخدار مشاهده نمودند که تحمل فعالیت های تقویتی ، زاویه extension آرنج ، دامنه حرکتی flexion/extension شانه و تنه ، گشتاور رانشی حلقه رانش ، گشتاور extension مچ افزایش و بسامد ضربه کاهش می یابد .
ایشان نتیجه گرفتند که برنامه های مهارت آموزی موجب بهبود رانش صندلی چرخدار دستی بدون افزایش تنش وارد بر اندام فوقانی می شود و در پیش گیری از ابتلا به آسیب های ناشی از استفاده بیش از حد مؤثر می باشند . [ ۲۳ ]
براساس مطالعه بوگنوت[۹۰] و همکاران ( ۲۰۰۳ ) بر روی تأثیر برنامه مهارت آموزی با استفاده از ارگومتر صندلی چرخدار[۹۱] بر ظرفیت کاری[۹۲] و متغیرهای وابسته به ریه و قلب[۹۳] بیماران ضایعه نخاعی ، بهره گیری از مهارت آموزی با ارگومتر صندلی چرخدار موجب بهبود ظرفیت کاری تا ۴۴% بدون تغییر در نرخ ضربان قلب می شود و سطح سازگاری[۹۴] و ظرفیت تحمل[۹۵] بیماران را بهبود می بخشد . [ ۲۴ ]
استفاده مکرر از ساختار عضلانی نامتقارن [ عضلات قدامی تنه و عضلات خلفی تنه ] موجب صدمات ناشی از استفاده از صندلی چرخدار می شود و برنامه تمرینی که موجب افزایش تقارن عضلانی شود موجب کاهش وقوع چنین صدماتی می شود . [ ۲۵ ]
رانش صندلی های چرخدار دستی خودران با استفاده از حلقه های رانش
معمول ترین صندلی چرخدار مورد استفاده در بین کاربران صندلی های چرخدار ( ۹۰ درصد از کل کاربران ) ، صندلی های چرخدار دستی می باشد که حلقه های رانش ( handrim , pushrim یا push/hand ) به عنوان واسط فرد/فناوری عمل می کند . با وجود آنکه حلقه های رانش مهمترین واسط بین کاربر صندلی چرخدار با صندلی چرخدار می باشد در طی ۵۰ سال گذشته کمترین نوآوری و تغییر در طرح حلقه های رانش ایجاد شده است . تداوم استفاده از حلقه های رانش ناشی از طراحی ساده ، آسانی استفاده ، هزینه پایین و نیاز به تعمیر و نگهداری پایین آنها بوده است . با این وجود بسیاری از کاربران صندلی های چرخدار دستی ذکر نموده اند که حلقه های رانش معمولی نیاز آنها را برای یک رانش مؤثر پاسخگو نمی باشد . بنابر مطالعات صورت پذیرفته و بیومکانیک رانش ، کاربران صندلی های چرخدار دستی به طور متوسط ۲۵۰۰ بار در یک روز بر حلقه های رانش ضربه وارد می کنند و در صورتیکه روزانه به طور متوسط ۴۵ دقیقه صندلی چرخدار را برانند در هفته ۱۷٫۵۰۰ بار و در ماه کاربر ۷۵٫۰۰۰ بار این کار را انجام می دهد . حداکثر نیروی رانش حدود ۴۵ تا ۱۱۰ نیوتن برآورد شده است
[ ۲۶ ].
در رانش صندلی های چرخ دار دستی، هر ضربه پیش برنده ای[۹۶] را که کاربران صندلی چرخدار بر حلقه های رانش وارد می کنند به دو فاز تقسیم می شود : فاز ضربه[۹۷] و فاز بازیابی[۹۸] . فاز ضربه مرحله ای است که دستان کاربر در تماس با حلقه های رانش است و فاز بازیابی مرحله ای است که دستان کاربر با حلقه های رانش تماس ندارند و فرد خود را برای ضربه بعدی آماده می کند [ ۲۷ ].
فاز ضربه دارای دو قسمت است :
الف- تماس دست
ب- عمل رانش یا انتقال و استقرار در وضعیت مکانی جدید
شروع این فاز ، تماس دست با حلقه رانش برای اعمال نیروی محرکه است . در لحظه تماس دست بدون اینکه از پیشروی صندلی چرخدار ممانعت شود ، مچ باز شده و آرنج در وضعیت خم شدن و شانه در حالت خم شدن و بالا رفتن قرار می گیرد .
در این مرحله عضلات دلتوئید قدامی و سینه ای بزرگ فعال می شوند تا به طور هماهنگ و موزون شانه را در وضعیت خمیده نگه دارند . در ابتدا عضله دو سر بازو در حرکت خم شدن آرنج شرکت می کنند و باز کننده های مچ نیز با حرکت بر مسیر انحنای حلقه رانش ، دست ها را برای تماس آماده می کنند .
عضله خم کننده انگشتان نیز در این عمل فعال می شود . همچنین عضلات مچ در آغاز تماس با حلقه رانش فعال می شوند . در مرحله رانش ، دست ها با حرکت خود نیروی لازم را برای حفظ گشتاور اعمال می کنند . در آغاز این مرحله دست ها در در وضعیت پایین و عقب همراه با گرایش به خط میانه بدن قرار می گیرد که با خم شدن سریع شانه ها توام می باشد . در این میان خم شدن مفصل آرنج نیز در ایجاد نیروی لازم به حلقه رانش کمک می کند . هنگامی که دست ها از طرفین به سمت حلقه رانش نزدیک می شوند از خط میانه بدن عبور کرده و جلو می روند . حرکت باز شدن آرنج نیز در اعمال نیرو به حلقه رانش نقش مؤثر داشته و مچ سریعاً حرکات باز و بسته شدن را انجام می دهند .
فاز بازیابی نیز شامل دو قسمت است :
رها کردن دست و بازیابی مؤثر
در بخش اول دست از نقطه تماس با حلقه رانش رها می شود ، بطوری که این عمل نباید تأثیر منفی بر سرعت حرکت صندلی چرخدار بگذارد . در لحظه آزاد شدن دست ، شانه در حالت تا شدن قرار دارد و مفاصل آرنج و مچ شروع به باز شدن می کنند . در هنگام بازیابی عضلات ذوزنقه ای ، دلتوئید میانی و خلفی و خم کننده های مچ برای خنثی کردن اثر نیروی مؤثر بر حلقه رانش فعال می شوند . بعد از جدا شدن ، حرکت دست ها در سراسر فاز بازیابی ادامه می یابد . این عمل به وسیله حرکات بالا رفتن و باز شدن شانه صورت می گیرد ، ضمن اینکه آرنج به تدریج خم شده و مچ در وضعیت باز شدن قرار می گیرد .
میزان فعالیت عضلات هنگام فاز بازیابی نسبت به مرحله رانش بطور قابل توجهی کاهش می یابد . این نکته ناشی از دو عامل اصطکاک زمین و جاذبه است . در مرحله رانش دست ها در ابتدای حرکت در برابر نیروهای جاذبه مقاومت می کنند .
در بخش دوم ، مهمترین عضله فعال دلتوئید خلفی است که باعث باز شدن شانه می شود . عضلات ذوزنقه ای بالایی نیز در حرکت بالا بردن شانه شرکت می کنند . احتمال می رود میزان اختلاف در ابعاد حلقه رانش در بالا بردن شانه مؤثر باشد بطوری که هر اندازه قطر حلقه رانش کوچکتر باشد نیاز کمتری به بالا رفتن شانه می باشد تا دست برای تماس با حلقه رانش آماده گردد [ ۲۸ ].
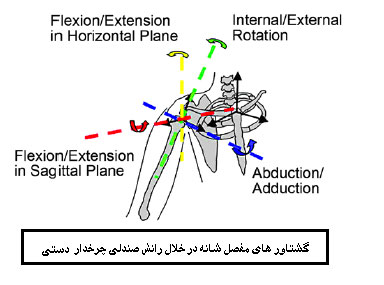
رانش صندلی چرخدار به این روش کاری بسیار تکراری است که به طور عمده توسط اندام فوقانی انجام می شود و موجب اعمال فشار اضافی بر مفاصل شانه می شود که از نظر کالبد شناختی برای تحمل چنین باری در مدت زمان طولانی طراحی نشده است(شکل ۱۶) ]۲۹ [ . در واقع حلقه های رانش جهت تطابق راحت با دستان کاربر طراحی نشده اند . سطح تماس حلقه های رانش با دست بسیار اندک است و محلی برای قرارگیری انگشت شست بر روی آن وجود ندارد و فاصله موجود بین حلقه رانش و چرخ های عقب موجب گیر کردن انگشتان بین آنها و پره های چرخ می شود . در صندلی چرخدار معمولی بازده مکانیکی رانش بسیار کم و بین ۸/۱۳-۲ درصد( حدود ده درصد ) براساس سطح ضایعه ، تکنیک رانش و سختی عمل[۹۹] می باشد . [۳۰،۳۱،۳۲ ]
رانش صندلی چرخدار ، روشی پر فشار از تحرک برای سامانه قلبی تنفسی و سامانه اسکلتی عضلانی می باشد و مستلزم به کار بردن اندام های فوقانی در کلیه فعالیت های روزمره زندگی است . کارایی اندام های فوقانی در رانش صندلی چرخدار در مقایسه با کاربرد اندام تحتانی در حرکت معمول بسیار کمتر است و مستلزم تلاش بیشتر می باشد و در نتیجه به ظرفیت کاری[۱۰۰] کمتری منجر می شود .[۳۲ ]
به طور خلاصه می توان عوامل مؤثر در کاهش بازده مکانیکی در رانش صندلی های چرخدار دستی را در موارد زیر ذکر نمود :
۱- جهت تداوم حرکت با صندلی های چرخدار دستی ، کاربر مجبور است به طور متناوب بر حلقه های رانش ضربه وارد نماید و جهت این کار باید به طور متناوب حلقه های رانش را گرفته و رها نماید . این فرایند باید در محدوده ای خارج از میدان بینایی و سریع انجام شود و نیاز به هماهنگی بالایی دارد .
۲- در طی گرفتن و رها کردن حلقه های رانش در خلال حرکت ، تطابق سرعت دست ها با سرعت حلقه های رانش مشکل بوده و تفاوت سرعت بین دست ها و حلقه های رانش موجب اعمال یک نیروی منفی ( اثر ترمزی ) بر حرکت صندلی چرخدار می شود . این اثر ترمزی به ویژه زمانی که کاربر در حس ، هماهنگی یا کنترل موتوری اختلال داشته باشد ، بیشتر آشکار می گردد .
۳- در خلال فاز ضربه کاربر باید نیروی بزرگی را در مدت زمان بسیار کوتاهی ( بین ۲/۰ تا ۶/۰ ثانیه و به طور کلی نیم ثانیه ) تولید نماید و از سویی دیگر موقعیت اندام فوقانی در حین این عمل در شرایط ایده آل نبوده و به ثبات مفصلی قابل توجهی در شانه ، کتف ، مچ و دست نیاز می باشد . ( مطالعات گسترده نشان داده اند که گرفتن اشیای کوچک[۱۰۱] نه تنها در آغاز CTS مؤثر می باشد بلکه در تشدید درد ناشی از CTS[102] نیز مشارکت می نماید . لذا گرفتن حلقه های رانش در صندلی های چرخدار دستی ، می تواند در تشدید درد CTS مؤثر باشد) . [ ۳۳ ]
۴- اعمال نیرو بر حلقه های رانش به صورت افقی بالاترین مزیت مکانیکی را در پی خواهد داشت . ولی از سویی دیگر، آناتومی شانه و در نتیجه آن جهت اندام فوقانی در حرکت ضربه بر حلقه های رانش، اعمال نیرو فقط به صورت افقی را امکان پذیر نمی نماید .
رانش صندلی چرخدار همراه با سایر تنش های وارده بر اندام فوقانی ( چون جابجایی از صندلی چرخدار به سایر سطوح و بالعکس ) می تواند منجر به آسیب در مفاصل مچ ، آرنج و شانه شود.
بنا بر پژوهش های انجام شده شیوع این آسیب ها در بین کاربران صندلی چرخدار ۵۷ درصد می باشد . احتمال بروز این آسیب ها با توجه به سطح ضایعه و طول زمان پس از ضایعه افزایش می یابد . [ ۳۴،۳۵، ۳۶ ]
مشکلات ناشی از استفاده طولانی مدت از صندلی چرخدار دستی به درد و عدم راحتی محدود نگردیده به یک سبک زندگی غیرفعال از نظر فیزیکی منجر می گردد که به دنبال خود می تواند چاقی ، دیابت و مشکلات قلبی- عروقی را به دنبال داشته باشد[ ۳۲،۳۷ ].
در یک پیمایش در سال ۱۹۹۴ با مشارکت ۱۱۷ کاربر صندلی چرخدار تنها ۳۹ درصد کاربران صندلی چرخدار خود را با استفاده از حلقه های رانش می راندند . ۵۴ درصد ازحلقه رانش و تایرچرخ های عقب و ۷ درصد از تایر چرخ های عقب برای این منظور استفاده می کردند .
به عبارت دیگر ۶۰ درصد از کاربران از رانش صندلی چرخدار صرفاً با استفاده از حلقه های رانش راضی نبوده اند[۳۸]. در مطالعات انجام شده در خصوص بیومکانیک رانش صندلی چرخدار نیز تطابق ضعیف دست ها با حلقه های رانش را عامل کاهش بازده رانش صندلی چرخدار و عامل بالقوه آسیب رساننده به مچ و شانه دانسته اند.
بحث و نتیجه گیری
کاربران ، کارشناسان و محققین ، رانش صندلی چرخدار را حوزه ای می دانند که به پیشرفت فناوری در آن نیاز می باشد .در دهه گذشته تغییرات اندکی در طراحی صندلی های چرخدار دستی انجام شده است . صندلی های چرخدار دستی سامانه های پیچیده ای هستند و طراحی صندلی های چرخدار بر تحرک ، استقلال و دسترسی کاربر آن تأثیرگذار می باشد . بررسی رانش صندلی چرخدار دستی به دلیل رشد جمعیت استفاده کننده از صندلی چرخدار و درخواست آنها مبتنی بر داشتن وسیله حرکتی مؤثر برای حفظ کیفیت زندگی برابر با جامعه عادی ، به طور فزاینده ای اهمیت یافته است . تلاش های متعددی جهت بهبود رانش صندلی های چرخدار دستی چون تغییر در چرخ ها و تایرها ، اضافه کردن چرخ دنده ها[۱۰۳] و طراحی سامانه های جایگزین رانش صورت پذیرفته است ولی هنوز کاربران و کارشناسان اعتقاد به نوآوری در رانش صندلی های چرخدار دستی دارند . [ ۳۹ ]
سه دلیل نیاز به پیشرفت در فناوری رانش صندلی چرخدار دستی عبارت اند از :
۱- افزایش استقلال کاربران : طی موانعی چون شیب ها ، آستانه درها ، مسیرهای ناهموار ، فرش و مسیرهای طولانی که به صورت روزمره کاربران صندلی چرخدار با آن مواجه هستند به قدرت و تحمل بیشتری نیاز دارد . بهبود فناوری های رانش ، با کاهش خستگی و افزایش قدرت مانور موجب افزایش استقلال کاربران در فعالیت های روزمره می شود .
۲- فواید فیزیکی برای کاربران : استفاده طولانی مدت یا نادرست از صندلی چرخدار دستی منجر به آسیب های ناشی از وارد آمدن فشارهای مکرر[۱۰۴] چون rotator cuff tears و carpal tunnel syndrome می شود .
درد و آسیب اندام فوقانی در بین کاربران صندلی های چرخدار دستی شایع می باشد . آسیب های شانه در بیش از ۵۱ درصد از کاربران صندلی های چرخدار دستی و علاوه بر آن شیوع درد در مفاصل آرنج ، مچ و دست به ترتیب ۱۶% ، ۱۳% ، ۱۱% گزارش شده است.
شیوع carpal tunnel syndrome و rotator cuff tendonitis در کاربران صندلی چرخدار دستی بیش از ۵۰ درصد ( در مقایسه با ۳ درصد در جامعه عادی ) می باشد.
در خلال رانش صندلی چرخدار دستی کاربر می بایست نیروهای بزرگی را بر حلقه رانش اعمال کند و این در حالی است که نیروی وارده توسط کاربر به صورت کامل صرف جلو راندن صندلی چرخدار نمی شود ، بلکه بخشی از آن برای برقراری اصطکاک بین دست ها و حلقه های راتش مصرف می شود .[ ۴۰ ]
بیش از ۵۰ درصد کاربران صندلی چرخدار ضایعه نخاعی به درد و آسیب اندام های فوقانی مبتلا شده اند و در غالب مطالعات رانش صندلی چرخدار را به عنوان یک علت این مسئله شناخته اند .
در مطالعات مقطعی شیوع درد شانه در افراد مبتلا به ضایعه نخاعی بین ۳۱ تا ۷۳ درصد و شیوع CTS 49 تا ۷۳ درصد گزارش شده است . در کلیه این مطالعات نویسندگان اظهار نموده اند که ترومای تکراری ناشی از رانش صندلی چرخدار و جابجایی از و بر آن تا اندازه ای عامل این آسیب ها می باشند . در یک مطالعه شیوع درد معنی دار در اندام فوقانی افراد تتراپلژی ۵۹ درصد و در افراد پاراپلژی ۴۱ درصد گزارش گردید . [ ۴۱،۴۲ ]
مطالعات نشان داده اند که حرکات تکراری حین رانش صندلی چرخدار دستی ، دو مشکل اساسی ایجاد می نماید که موجب کاهش کیفیت زندگی می شود : درد و از دست دادن عملکرد . عمده ترین شکایت ها شامل درد شانه ناشی از rotator cuff degeneration و از دست دادن عملکرد دست در اثر سندروم تونل کارپال ( CTS ) می باشد . خستگی عمومی شکایت عام دیگر می باشد . در برخی از افراد و به ویژه در کوادری پلژی و کسانی که مدت زیادی از ضایعه نخاعی آنها می گذرد این مشکل می تواند به از دست دادن بخشی یا کل ظرفیت فرد در رانش مؤثر صندلی چرخدار شود . [ ۴۳ ،۳۰ ، ۳۳ ]
کاربران صندلی چرخدار به جراحات فیزیکی متعدد مبتلا می شوند[ ۴۴ ] . مطالعات اخیر ثابت کرده اند که کاربران صندلی های چرخدار با توجه به الگوی تکراری حلقه زدن در معرض جراحات استفاده بیش از حد[۱۰۵]
به ویژه در نواحی شانه ، آرنج و مچ قرار می دهد . سایر جراحات و شرایطی که کاربران صندلی چرخدار با آن مواجه می شوند . عبارتند از : کمردرد ، خستگی ، سوختگی دست ها به وسیله حلقه رانش ، کثیف شدن لباس ها ، کثیف شدن دست ها ، عرق کردن و گرمازدگی . اغلب این صدمات از استفاده بیش از حد یا استفاده غلط از عضلات شانه ، بازو و دست ها ناشی می شود.
پیامد درد در اندام فوقانی کاربران صندلی های چرخدار عبارتند از :
– از دست دادن استقلال در نتیجه افزایش فشار بر مراقبین
– کاهش فعالیت و در نتیجه آن ابتلا به عوارض اجتماعی و روانی
– کاهش کیفیت زندگی
– افزایش هزینه های سلامت
– ابتلا به ناتوانی های ثانویه
– به طور خلاصه آسیب های ناشی از صندلی چرخدار در مفاصل اندام فوقانی عبارتند از :
– شانه با شیوع ۳۱ تا ۷۵% شامل Impingement ، rotator cuff pathology ، distal clavicle osteolysis ، premature joint degeneration
– درد آرنج با شیوع ۱۶ تا ۳۵ درصد شامل Tendonitis
– درد مچ با شیوع ۱۳ تا ۷۴ درصد شامل Carpal tunnel syndrome
– درد مچ با شیوع ۱۵ تا ۴۳ درصد [ ۴۵]
بنابر مطالعه بونینگر و همکاران که با هدف بررسی درد گردن[۱۰۶] در کاربران صندلی های چرخدار صورت گرفت مشخص گردید که شصت و شش درصد از گروه کاربران صندلی چرخدار مورد بررسی در این مطالعه از زمانیکه کاربر صندلی چرخدار شده اند به درد گردن مبتلا شده اند و ۶۰% از آنها در طی یک ماه پیش از مطالعه درد گردن داشته اند . ۶۰% از این افراد به این دلیل به پزشک مراجعه نموده اند و فعالیت روزمره ۴۰% از آنها به علت این درد ، محدود گردیده است . [ ۴۶ ]
۳- جمعیت زیاد کاربران صندلی های چرخدار دستی : در سرتاسر جهان برآورد می شود ۱۰۰ تا ۱۲۰ میلیون نفر فرد ناتوان به صندلی چرخدار نیاز داشته باشد ، هر چند کمتر از ده درصد از این افراد به یک صندلی چرخدار دسترسی دارند .[۴۷] اگر چه این ارقام مورد تردید قرار دارند ، کارشناسان پیش بینی می کنند که تعداد افراد نیازمند به صندلی چرخدار طی ده سال آینده ، ۲۲ درصد افزایش خواهد یافت .
در سال ۱۹۹۴ در ایالات متحده از حدود ۶/۱ میلیون نفر کاربر صندلی چرخدار فقط ۱۶۰ هزار نفر از صندلی چرخدار الکتریکی استفاده می کردند [ ۴۸] .
در صورتی که توان فیزیکی فرد پاسخگوی انجام فعالیتی معین با صندلی چرخدار دستی نباشد فرد ناچار به استفاده از صندلی چرخدار الکتریکی یا ترک آن فعالیت خواهد بود .
صندلی های چرخدار الکتریکی بسیار سنگین تر از انواع دستی هستند که موجب ایجاد محدودیت در قابلیت حمل و نقل آنها گردید ، اغلب به سامانه حمل و نقل ویژه ( قابل دسترس برای معلولین ) یا خودرو Van می باشند . انواع الکتریکی صندلی های چرخدار دارای ابعاد بزرگتری نیز بوده و در نگهداری آنها در محیط های بسته مانند خانه محدودیت ایجاد می نمایند و از سویی دیگر موجب تقویت تداعی و تصویر ناتوانی در فرد می شوند .
یا این وجود نیاز به انجام یک فعالیت می تواند موجب انتقال یک فرد از استفاده از صندلی چرخدار دستی به صندلی چرخدار الکتریکی شود و یا کاربر با توجه به فعالیت و شرایط محیط از یکی از دو وسیله مذکور استفاده نماید که حالت دوم خود موجب پیچیده تر شدن شرایط و افزایش هزینه می شود . [ ۴۵ ]
صدمات مرتبط با استفاده از صندلی چرخدار موجب تحمیل هزینه بر شرکت های بیمه و کاربران و در نهایت جامعه می شود . [ ۴۹ ]
وود[۱۰۷] سه استراتژی زیر را جهت غلبه بر ناکارایی رانش صندلی های چرخدار دستی با استفاده از حلقه های رانش پیشنهاد نمود :
– حداکثر نمودن کارایی صندلی چرخدار و واسط فرد/فناوری
– بهبود ساختار و کارایی فیزیولوژیکی فرد
– تغییر روش رانش
که در این طرح پیشنهاد سوم به صورت خاص مد نظر می باشد .
در پرتو دانش بیومکانیکی و فیزیولوژیکی رانش صندلی چرخدار دستی نیاز به پرداختن به روش هایی بجز رانش با حلقه های رانش ، احساس می شود . [۵۰]
شکل ها
|
|
شکل۱- صندلی چرخدار دستی دیگرران
|
شکل۲-صندلی چرخدار دستی استاندارد
|
|


|
|
شکل۳-صندلی چرخدار دستی سبک
|
شکل۴- صندلی چرخدار دستی بسیار سبک |
|


|
|
شکل۵-ضربدری صندلی چرخدار دستی |
شکل۶-تکیه گاه ساق
|
|
|
|
شکل ۷- مبلمان صندلی چرخدار
|
شکل ۸- روش های متفاوت رانش |
|
|
|
شکل ۹- عرض نشستنگاه مناسب |
شکل ۱۰- عمق زیاد صندلی چرخدار
|
|
|
|
شکل ۱۱- عمق کم صندلی چرخدار |
شکل ۱۲- تکیه گاه کوتاه دست
|
|
|
|
شکل ۱۳- تکیه گاه بلند دست |
شکل ۱۴- ارگومتر مورد استفاده در مطالعه Desroches
|
|
|
|
شکل ۱۵- الگوی نیم دایره در رانش صندلی چرخدار دستی |
شکل ۱۶- گشتاورهای مفصل شانه در خلال رانش صندلی چرخدار دستی
|
|

۱-Cooper Rory A, wheelchair selection and configuration, Demos Medical Publishing, Inc, 1998.
۲- Braddom, Randall. et al ( Editors ); Physical Medicine & Rehabilitation ( Second Edition); W.B.SAUNDERS CAMPANY, 2000 .
۳٫ DLF Factsheet, Choosing a standard self propelled wheelchair. Disabled Living Foundation, www.dlf.org.uk. 2006.
۴٫ Cook, A.M. et al. (Editors), Assistive Technologies: Principles and Practice Faculty of Rehabilitation Medicine University of Alberta, Edmonton, Alberta Canada. Elsevier Science Health Science div, 2002.
۵٫ Beekman, C.E. et al. Energy Cost of Propulsion in Standard and Ultralight Wheelchairs in People With Spinal Cord Injuries. PHYS THER Vol 79, 1999, [abstract].
۶- Goldberg, Bertram. et al ( Editors ); Atlas of Orthoses and Assistive Devices , Third Edition ; Mosby ; 1997 .
۷٫ Sawatzky, B. et al. The ergonomics of different tyres and tyre pressure during wheelchair propulsion. Ergonomics Vol 47, 2004, [abstract].
۸٫Minkel, Jean, Obtaining Wheeled Mobility: Essential Elements to Consider.
Georgetown University Center for Child and Human Development(Brief 4) , Institute for Child Health Policy, University of Florida,2005.
۱۲- خصوصی ، تورج ، پورامیری ، نریمان؛ طراحی صندلی چرخدار آزمایشگاهی با قابلیت تغییر ابعاد هندسی . پایان نامه مهندسی مکانیک زیر نظر دکتر محمد حق پناهی ، دانشگاه علم و صنعت ایران .
۱۰٫ BRUBAKER, C.E; Wheelchair prescription : an analysis of factors that affect mobility and performance; Journal of Rehabilitation Research and Development Vol . 23 No. 4;Pages 19-26
۱۱٫ Rodgers, M. et al. Influence of trunk flexion on biomechanics of wheelchair propulsion. Journal of Rehabilitation Research and Development. May/June 2000;Vol 37:Page 283-295.
۱۲٫ Richter, W.M. The effect of seat position on manual wheelchair propulsion biomechanics: a quasi-static model-based approach. Medical Engineering & Physics. 2001;23:page 707-712.
۱۳٫ Aissaoui, R. et al. Biomechanics of Manual Wheelchair Propulsion in Elderly: System Tilt and Back Recline Angles Am J Phys Med Rehabil 2002, [abstract].
۱۴٫ Desroches, G. et al. Effect of system tilt and seat-to-backrest angles on load sustained by shoulder during wheelchair propulsion. November/December 2006;Vol 43:Page 871-882.
۱۵٫ Triolo, R.J. et al. Effects of functional Electrical stimulation on manual wheelchair propulsion. ASB 29th Annual Meeting. July 31-August 5 2004.
۱۶٫ Kotajarvi, B.R. et al. The effect of seat position on wheelchair propulsion biomechanics. Journal of Rehabilitation Research & Development. May/June 2004;Volume 41, Number 3B:Pages 403–۴۱۴ .
۱۷٫ Boninger, M.L. et al. Manual wheelchair pushrim biomechanics and axle position Arch Phys Med Rehabil. 2000, [abstract].
۱۸٫ Boninger, M.L. et al. Propulsion patterns and pushrim biomechanics in manual wheelchair propulsion , Arch Phys Med Rehabil. 2002 , [abstract].
۱۹٫ Wu; H.W. et al. The Comparison of Two Different Propulsive Techniques For Manual Wheelchair Propulsion.American Society of Biomechanics,Conferences,2001 .
۲۰٫ Boninger, M.L. et al. Shoulder Magnetic Resonance Imaging Abnormalities, Wheelchair Propulsion, and Gender , Archives of Physical Medicine and Rehabilitation , 2003 ,[abstract].
۲۲٫ Boninger, M.L. et al. Relation between median and ulnar nerve function and Wrist kinematics during wheelchair propulsion , Archives of Physical Medicine and Rehabilitation, Vol 85, 2004, [abstract].
۲۳٫ Rodgers, M. et al. Influence of training on biomechanics of wheelchair propulsion. Journal of Rehabilitation Research and Development. 2001;Vol 38:Page 505-511.
۲۴٫ Bougenot, M.P. et al. Effects of a wheelchair ergometer training programme on spinal cord-injured persons , Spinal Cord, Vol 41. 2003, [abstract].
۲۵٫ Algood, S.D. et al. MS, Impact of a Pushrim-Activated Power-Assisted Wheelchair on the Metabolic Demands, Stroke Frequency, and Range of Motion Among Subjects With Tetraplegia , Physical Medicine and Rehabilitation, 2004, [abstract].
۲۶٫ Koontz, A.M. et al. Investigation of the Performance of an Ergonomic Handrim as a Pain-Relieving Intervention for Manual Wheelchair Users. Arch Technol. 2006.
۲۷٫Andrew M. et al. PROPOSAL TO STANDARDIZE AND REDEFINE THE PHASES OF MANUAL WHEELCHAIR PROPULSION, RESNA 2007,proceedings.
۲۸- پوررحیمی ، احمد ؛ بررسی نیازها و عوامل حاکم در طراحی صندلی های چرخدار ورزشی ( بسکتبال ) ؛ پایان نامه تحصیلی جهت اخذ درجه کارشناسی ارشد طراحی صنعتی ، دانشکده هنرهای کاربردی ، دانشگاه هنر ، ۱۳۸۳ .
۲۹٫ Rainal, Sh. et al. BIOMECHANICS OF UPPER EXTREMITY DURING WHEELCHAIR PROPULSION. American Society of Biomechanics,Conferences,2006 .
۳۰٫ Boninger, D. Handrim Designs. Paralyzed Veterans of America. November 2004.
۳۱٫ Guo, L.Y. et al. MECHANICAL ENERGY AND POWER FLOW OF THE UPPER EXTREMITY IN MANUAL WHEELCHAIR PROPULSION. American Society of Biomechanics,Conferences,2001 .
۳۲٫ Woued V. et. al. , Wheelchair propulsion: a straining form of ambulation. Indian J Med Res 121. June 2005; pp 719-722.
۳۳٫ Hoffman, M.D. Cardiorespiratory fitness and training in quadriplegics and paraplegics , Sports Med. 1986, [abstract].
۳۴٫ Samuelsson, K.A.M. et al. Shoulder pain and its consequences in paraplegic spinal cord-injured, wheelchair users. Spinal Cord. 2004, [abstract].
۳۵٫ Harris, G. et al. Late Complication of the Weight-Bearing Upper Extremity in the Paraplegic Patient , Clinical Orthopaedics and Related Research. 2007, [abstract].
۳۶٫ Kraft, George, Aging with a Disability , Physical Medicine And Rehabilitation Clinics Of North America, , Vol 16, Number 1, February 2005.
۳۷٫ Woude, L.H.V. et al. Manual wheelchairs: research and innovation in sports and daily life, Science & Sports, Vol 21. August 2006.[abstract].
۳۸٫ Perks B.A. et al. A survey of marginal wheelchair users. Journal of Rehabilitation Research and Development. November 1994; vol 31, no 4: page : 297-302.
۳۹٫Discussion Preparation for: Manual Wheelchair Propulsion. Rehabilitation Engineering Research Center on Technology Transfer Federal Laboratory Consortium – Mid-Atlantic Region.
۴۰٫ Burke, T.S. Design Construction and Testing of an Innovative Mechanism for Manual Wheelchair Propulsion, Thesis submitted for the degree of master of science in mechanical engineering, W.Scott Wayne, Ph.D., Chair, Department of Mechanical Engineering , West Viginia University Morgantown, 2002.
۴۱٫ Boninger, M.L. et al. Pushrim biomechanics and injury in spinal cord injury:Recommendations based on CULP-SCI investigations. Journal of Rehabilitation Research & Development . May/June 2005;Volume 42, Number 3: Pages 9–۲۰ .
۴۲٫ Nichols, P.J. et al. Wheelchair user’s shoulder? Shoulder pain in patients with spinal cord lesions. Scand J Rehabil Med. Vol 11(1), 1979; [abstract].
۴۳٫ Requejo, P. Alternative Modes of Manual Wheelchair Propulsion.,SCI Life Magazine. May -June 2006.
۴۴٫ Xiang, H. et al. Wheelchair related injuries treated in US emergency departments. Injury Prevention, Vol 12, 2006. [abstract]
۴۵٫ Cooper, R.A. et al. Technical Contributions to Improved Outcomes, National Training Event Information ,2003 conference ,presentation file .
۴۶٫ Boninger, M.L. et al. Investigating neck pain in wheelchair users. Am J Phys Med Rehabil. Vol 82, 2003, [abstract]
۴۷٫ Cooper, R.A. et al. Trends and Issues in Wheeled Mobility Technologies.
۴۸٫ Kaye, H.S. et al. wheelchair use in the United States University of California, San Francisco. May 2002, [abstract].
۴۹٫ Giesbrecht, E.D. A Thesis submitted to the Faculty of Graduate studies in partial fulfillment of the requirement for the degree of MASTER OF SCIENCE. School of Medical Rehabilitation Faculty of Medicine University of Manitoba. 2006.
۵۰٫ Woude, L.H.V. et al. Biomechanics and physiology in active manual wheelchair propulsion. Med Eng Phys. 2001. [abstract]
[۱]ISMGF
[۲] Manual wheelchair
[۳] Self-propelled manual wheelchair
[۴] Attendant-Propelled Wheelchairs
[۵] One-Arm Drive
[۶] Foot-Drive Wheelchairs
[۷] Geriatric
[۸] Gerry
[۹] supporting structure
[۱۰] propelling structure
[۱۱] Seating system
[۱۲] Positioning system
[۱۳] seat rails
[۱۴] back posts
[۱۵] cold-rolled steel
[۱۶] stainless steel
[۱۷] lightweight wheelchair
[۱۸] ultralight frame
[۱۹] Beekman
[۲۰] stiffness
[۲۱] shock
[۲۲] folding
[۲۳] rigid
[۲۴] crossbar
[۲۵] arm rest
[۲۶] flip back
[۲۷] desk-length armrest
[۲۸] full length armrest
[۲۹] leg rests
[۳۰] foot plates
[۳۱] front rigging
[۳۲] swing away
[۳۳] brake
[۳۴] push handle
[۳۵] antitip devices
[۳۶] upholstery
wire wheels [37]
molded [38]
magnesium [39]
Mag [40]
trueness [41]
[۴۲] wheel alignment
wheel base [43]
Camber [44]
quick-release [45]
pneumatic[46]
airless [47]
Sawatzky [48]
semi pneumatic [49]
foam [50]
solid [51]
flat-free or puncture-proof [52]
shock absorption [53]
[۵۴] casters
[۵۵] polyurethane
[۵۶] shimmy
[۵۷] interface
[۵۸] push rim or hand rim
۱۰۷high gear
۱۰۸ De Facto
۱۰۹one-arm-drive
۱۱۰ viability
[۶۳] dependent mobility
[۶۴] independent manual mobility
[۶۵] independent powered mobility
[۶۶] Brubaker
[۶۷] propulsion efficiency
[۶۸] Forward flexion
[۶۹] chicken winging
[۷۰] stroke biomechanics
[۷۱] Rodgers
[۷۲] Richter
[۷۳] seat position
[۷۴] push angle
[۷۵] extension
[۷۶] Aissaoui
[۷۷] Desroches
[۷۸] load
[۷۹] Ronald J.Triolo
[۸۰] lumbar trunk extensor
[۸۱] Katajarvi
[۸۲] push time
[۸۳] drive wheels
[۸۴] steering wheels
[۸۵] Boninger
[۸۶] push angle
[۸۷] stroke patterns
[۸۸] Hong-Wen Wu
[۸۹] training
[۹۰] Bougenot
[۹۱] wheelchair ergometer Training Programme
[۹۲] work capacity
[۹۳] ardiorespiratory
[۹۴] fitness level
[۹۵] endurance capacity
[۹۶] propulsive stroke
[۹۷] push phase
[۹۸] recovery phase
[۹۹] intensity of the exercise
[۱۰۰] work capacity
[۱۰۱] pinch gripping
[۱۰۲] Carpal Tunnel Syndrome
[۱۰۳] gears
[۱۰۴] repetitive strain injuries
[۱۰۵] overuse injuries
[۱۰۶] neck pain
[۱۰۷] Van der Woude
چکیده
تحرک برای سلامت ، تعامل اجتماعی و بهزیستی افراد وابسته به صندلی چرخدار ، لازم و اساسی می باشد و باید به عنوان یک هدف ضروری از فرایند توانبخشی و موفقیت در برقراری مجدد تعامل اجتماعی و تأمین یک زندگی مولد و فعال آنها در نظر گرفته شود.
معمول ترین صندلی چرخدار مورد استفاده در بین کاربران صندلی های چرخدار ، صندلی های چرخدار دستی هستند که حلقه های رانش به عنوان واسط فرد/فناوری عمل می کند . رانش صندلی چرخدار با حلقه های رانش کاری بسیار تکراری است که موجب بروز آسیب و درد در اندام فوقانی و ستون فقرات فرد می شود.
بررسی رانش صندلی چرخدار دستی به دلیل رشد جمعیت استفاده کننده از صندلی چرخدار و درخواست آنها مبتنی بر داشتن وسیله حرکتی مؤثر برای حفظ کیفیت زندگی برابر با جامعه عادی ، به طور فزاینده ای اهمیت یافته است . در پرتو دانش بیومکانیکی و فیزیولوژیکی رانش صندلی چرخدار دستی نیاز به پرداختن به روش هایی بجز رانش با حلقه های رانش ، احساس می شود .
در این بررسی مروری ، ضمن بررسی و طبقه بندی صندلی های چرخدار دستی، عوامل موثر بر رانش صندلی های چرخدار دستی بررسی و عوارض ثانویه آن ذکر گردیده است.
واژگان کلیدی: رانش صندلی چرخداردستی ، تحرک
مقدمه
صندلی های چرخدار تا حدود ۱۰۰۰ سال پیش به مقدار خیلی کمی پیشرفت نموده بودند . نخستین نمونه از یک صندلی چرخدار به یک تصویر از صندلی چرخدار سه چرخ که در سال ۵۲۵ بعد از میلاد کشیده شده است بر می گردد که یک مرد چینی بر روی آن سوار می باشد .
صندلی های چرخدار تا قرن شانزدهم میلادی تغییر قابل توجهی در طراحی خود نداشته ولی از آن به بعد در قرن شانزدهم میلادی در اروپا به نحو مطلوبی توسعه یافتند .
دهه ۱۸۷۰ اولین صندلی چرخدار همگانی در ایالت متحده توزیع گردید که دارای ساختار چوبی و حجیم بوده که دو چرخ محرک بزرگ در جلو و دو چرخ کوچک در عقب داشتند . در دهه ۱۹۱۰ به جای اجزای چوبی حجیم و سنتی از لوله های فلزی استفاده شد . اولین صندلی چرخدار الکتریکی در زمان جنگ جهانی اول تولید شد . در دهه ۱۹۴۰ اولین صندلی چرخدار مکانیکی تا شو ثبت گردید و در دهه ۱۹۵۰ اولین صندلی چرخدار الکتریکی همگانی توزیع گردید .
در دهه ۱۹۷۰ اولین بار برای ساخت شاسی صندلی چرخدار از آلیاژ آلومینیوم به کار رفته در هواپیما استفاده شد و در دهه ۱۹۸۰ صندلی های چرخدار الکتریکی پیشرفت نمودند .
در دهه ۱۹۹۰ صندلی های چرخدار الکتریکی با قابلیت تا شدن همراه با جدا شدن باتری ها و جاپایی ها وارد بازار گردید . بیشتر تغییرات در طراحی صندلی های چرخدار در دهه های اخیر انجام گرفته است .
مدت کوتاهی پس از جنگ جهانی دوم دکتر لودویک گاتمن و همکارانش در بیمارستان استوک مندویل انگلستان ، صندلی های چرخدار ورزشی را به عنوان یک وسیله توانبخشی ابداع نمودند .
وی در سال ۱۹۴۸ برای معلولین جنگی رقابت هایی را برگزار نمود . در سال ۱۹۵۲ اولین رقابت های بین المللی ورزشی با صندلی چرخدار آغاز شد و فدراسیون بازی های استوک مندیل[۱] تأسیس گردید . اولین بازی های بین المللی برای افراد ناتوان جسمی در سال ۱۹۶۰ در رم همراه با بازی های المپیک برگزار گردید .
صندلی های چرخدار ورزشی و تفریحی به فرد ناتوان، تصور و بینشی جدید از خود می بخشد و از سویی دیگر نگرش و شیوه برخورد جامعه را نسبت به او تغییر می دهد . معلول می تواند درون صندلی چرخدار خود یک قهرمان باشد و در سطوح بالای ورزشی رقابت کند .
برخی مددجویان گردش و سیاحت را به ورزش های تیمی و انفرادی ترجیح می دهند و استفاده از وسیله ای که در آن دنده ها و اهرم ها نقش بیشتری داشته باشند ، برایشان جذاب است . براساس این نیاز صندلی های چرخدار پدالی توسعه یافت . در این وسایل هدف بالا نگه داشتن سرعت پدال زدن و کاهش مصرف انرژی است به گونه ای که انرژی را بطور مؤثر به حرکت تبدیل می نماید .
در کشورهای خاور دور صندلی های چرخدار پدالی مکانیکی به عنوان صندلی چرخدار اصلی معلولین مورد استفاده قرار گرفت . این نوع صندلی های چرخدار نسبت به صندلی های چرخدار مکانیکی معمولی ، دارای کارایی و سرعت بیشتری بوده ، امکان طی مسافت های طولانی تر با آنها وجود دارد و در جاده های ناصاف وسیله مؤثرتری می باشند .
روش بررسی
نوع تحقیق، بررسی مروری است .ماده اولیه در این تحقیق ، کتاب ها و مقالات مرتبط با صندلی های چرخدار دستی می باشد . جامعه مورد مطالعه صندلی های چرخدار دستی است. ضوابط ورود به مطالعه و نوع منابع انتخابی،شامل :
۱- مقالات ، کتب و ژورنال هایی که از دانشگاه های معتبر دنیا بوده و با اهداف مورد مطالعه در این پژوهش مرتبط باشد.
۲- مقالات و کتب پس از سال ۱۹۵۰ .
مطالعاتی که هدف آنها تبلیغ باشد، از مطالعه خارج شده اند. جهت رعایت اصول اخلاقی،کلیه یافته ها و نام مسئولین و پروژه های ثبت شده با صداقت کامل گردآوری می شود . در زمینه ترجمه متون نیز ، دقت لازم از جهت حفظ چهارچوب مقاله و یا text مورد نظر اعمال گردیده است .
محدودیت ها در این مطالعه شامل:
۱- فقدان بانک ها و منابع اطلاعاتی در کشور با ارتباط مستقیم با موضوع
۲- محدودیت جستجو و منابع به زبان فارسی و انگلیسی
نتایج
صندلی های چرخدار دستی
در سالیان اخیر صندلیهای چرخدار دستی با سرعت زیاد پیشرفت نموده اند. تا چند سال پیش، فقط یک مدل صندلی چرخدار دستی وجود داشت . ولی امروزه، تنوع زیادی از مدلها و رنگها برای انتخاب کردن در دسترس می باشد .
صندلیهای چرخدار از یک صندلی دارای چرخ که حداقل جابجایی را تامین مینمودند به ارتزهای پیشرفته ای جهت پاسخگویی به تقاضاهای حرکتی کاربران آنها، تبدیل شده اند[۱ ].
انواع صندلی های چرخدار دستی
صندلی های چرخدار دستی بر پایه مبانی مختلف به روش های متفاوت طبقه بندی شده اند . صندلی های چرخدار دستی براساس فرد راننده ، به دو گروه خودران[۳] و دیگر ران[۴] طبقه بندی می شوند که به اختصار توضیح داده می شود[ ۲ ، ۳] .
صندلیهای چرخدار دستی خودران
صندلیهای چرخدار خودران (توانبخشی) برای استفاده توسط یک نفر به عنوان یک وسیله حرکتی طراحی میشوند. برخی از صندلیهای چرخدار توانبخشی را میتوان با توجه به نوع کاربری آنها یا کاربران خاص آن، در یک طبقه قرار داد.
در افراد مبتلا به نقص حرکتی که یکی از اندام فوقانی آنها نیز قطع است و یا افرادی که مبتلا به اختلالات حرکتی با منشاء مغزی مبتلا می باشند ، نیاز به صندلیهای چرخداری دارند که بتوانند آن را با یک دست برانند و هدایت نمایند. صندلیهای چرخدار تک دست ران[۵] شامل یک محور رابط بین دو محور چرخ عقب هستند.
چرخ عقب این صندلیها در سمت اندام فوقانی سالم دارای دو حلقه رانش و در سمت مبتلا فاقد حلقه رانش میباشد. حلقه رانش با قطر کم تر (در سمت سالم) علاوه بر انتقال قدرت به چرخ همان طرف از طریق محور رابط بر چرخ سمت دیگر نیز اعمال نیرو مینماید و این امر باعث میشود هنگامیکه کاربر چرخ یک طرف را به حرکت در میآورد، هر دو چرخ حرکت کنند . هنگامی که کاربر قصد تغییر جهت داشته باشد، حلقه رانش با قطر کم تر را رها نموده و با استفاده از حلقه رانش اصلی چرخ سمت سالم و اعمال نیرو فقط بر همان چرخ این کار را انجام میدهد.
برخی از افرادی که در اندامهای فوقانی و تحتانی ضعف دارند میتوانند با استفاده از مجموع توان اندام فوقانی و تحتانی یا با استفاده از اندام تحتانی صندلی چرخدار را برانند. طراحی و انتخاب یک صندلی چرخدار که با پا رانده میشود[۶] عمدتاً به این که چگونه فرد میتواند بیشترین فایده را از توانایی حرکتی خود ببرد، بستگی دارد [ ۲ ].
صندلیهای چرخدار دستی دیگر ران
همه صندلیهای چرخدار توسط سرنشین آن رانده و هدایت نمیشوند و در بسیاری از بیمارستانها و آسایشگاهها، صندلیهای چرخدار توسط همراهان و مراقبین رانده میشوند.
اگر صندلی کاملاً توسط همراه و بدون کمک سرنشین آن رانده شود، دیگر نیازی به چرخهای بزرگ عقب وجود نخواهد داشت (شکل ۱)[ ۳ ]. در طراحی صندلیهای چرخداری که همراه آن را میراند، میبایست هم سرنشین وهم فرد همراه را به عنوان استفادهکنندگان از صندلی مورد توجه قرار داد.سرنشین اغلب صندلیهای چرخداری که توسط همراه رانده میشود، سالمندان میباشند و گاهاً در ارتباط با استفاده کاربران سالمند[۷] ، این صندلیها را تحت عنوان ژری[۸] میشناسند [ ۱ ].
ساختار صندلی های چرخدار دستی
صندلی های چرخدار دستی دارای دو ساختار اصلی حمایتی[۹] و رانش[۱۰] می باشند که به اختصار در ذیل به آنها پرداخته می شود] ۴ [ .
ساختار حمایتی
ساختار حمایتی صندلی چرخدار شامل بدنه و ملحقات آن می باشد . سامانه های نشستنگاهی[۱۱] و موقعیت دهی[۱۲] اغلب به عنوان بخشی از ساختار حمایتی مورد توجه قرار می گیرند . لوازم فرعی بدنه ( مانند تکیه گاه دست و جاپایی ) نیز بخشی از ساختار حمایتی می باشند . در برخی از صندلی های چرخدار این لوازم فرعی با بدنه صندلی به صورت یکپارچه ساخته می شوند . برخی از ساختارهای حمایتی منحصر به فرد بوده و جهت وضعیت دهی فرد در فضا مورد استفاده قرار می گیرند[ ۴ ].
بدنه صندلی های چرخدار دستی
بدنه شامل ریل های نشستنگاه[۱۳] ، تیرهای پشتی[۱۴] و وسایل الحاق چرخها می باشد. در حال حاضر بدنههای کلیه صندلیهای چرخدار معمول، حول ساختارهای لوله ای تمرکز یافتهاند.
اغلب بدنه صندلی های چرخدار براساس ماده بکار رفته در آنها طبقه بندی می شوند . صندلی های چرخداری که بدنه آنها از استیل نوردسرد[۱۵] ساخته می شودو وزنی بین ۲۷ تا ۳۰ کیلوگرم دارند صندلی های چرخدار استاندارد(شکل۲) و نمونه هایی که از آلومینیوم یا استیل ضد زنگ[۱۶] ساخته می شوند و وزنی معادل ۱۲ تا ۱۸ کیلوگرم دارند صندلی های چرخدار سبک وزن[۱۷] (شکل۳) نامیده می شوند.
بدنه های خیلی سبک[۱۸] نوعاً از آلیاژ فلز آلومینیوم ، تیتانیوم یا مواد کامپوزیت ساخته می شوند و کمتر از ۱۰ کیلوگرم وزن دارند(شکل ۴) [ ۴ ] . بنابر مطالعه بیک من[۱۹] و همکاران ( ۱۹۹۹ ) ، استفاده از صندلی های چرخدار دستی بسیار سبک موجب افزایش بازده رانش در مقایسه با صندلی های چرخدار معمولی می شود . [ ۵ ]
استفاده از مواد کامپوزیت بر استیل یا آلومینیوم مزایای متعددی را در پی دارد . مواد کامپوزیت را می توان شکل داد که در نتیجه امکان ارائه طرح های زیباتر و جذابتری را نسبت به جوش دادن لوله های آلومینیوم یا استیل فراهم می نماید . کامپوزیت ها بادوام تر هستند و خواص آنها را می توان از نظر شکل ، استحکام و سختی[۲۰] مناسب کرد .
مواد کامپوزیت در مقایسه با فلزات ضربه[۲۱] و لرزش را به اندازه ای کمتر منتقل می کنند که این کاهش برای کاربران صندلی چرخدار محسوس می باشد .
بزرگترین مشکل این مواد قیمت بالای آنها می باشد که با افزایش حجم تولید و پیشرفت در سایر فناوری ها ( مانند تولید دوچرخه ) قیمت آنها نیز رو به کاهش می باشد . صندلی های چرخدار بسیار سبک و فعال مورد توجه کاربران فعال و با قدرت و دارای ثبات قسمت فوقانی بدن می باشد و اغلب در ورزش های با صندلی چرخدار استفاده می شوند [ ۴ ] .
بدنه صندلی های چرخدار دستی تاشو[۲۲] یا غیرتاشو)سخت( [۲۳] می باشند . نوعاً در صندلی های چرخدار تاشو از یک ساختار تاشونده دارای بار متقاطع[۲۴] (شکل ۵) استفاده می شود که امکان تا کردن آنها را هنگام حمل و نقل فراهم می نماید. مزایای بدنه های سخت عبارتند از :
– با توجه به سختی بدنه و عدم از دست رفتن انرژی در حرکات بدنه، برای رانش و مانور آسان تر هستند .
– استحکام و دوام بیشتری دارند و قطعات آنها کمتر گم می شود .
– امکان تنظیم بیشتری با توجه به وضعیت بدن کاربر مهیا می نمایند .
– اغلب جمع و جور تر هستند .
معایب بدنه های سخت عبارتند از :
– حمل و نقل آنها مشکل تر است .
– انبارداری آنها مشکل تر است .
– امکان بارگیری آنها بر روی سقف اتومبیل وجود ندارد .
– با توجه به سختی بدنه، نیروهای برشی بر بدن کاربر افزایش می یابد .
مزایای بدنه های تاشو عبارتند از :
– حمل و نقل و بارگیری آنها در خودرو آسان تر است .
– برای نگهداری به جای کمتری نیاز دارد .
– با توجه به انعطاف پذیری بدنه،بخشی از شوک ها و ضربه های وارده را جذب می کنند .
معایب این بدنه ها عبارتند از :
– با توجه به از دست رفتن انرژی در حرکات بدنه، رانش آنها مشکل تر است .
– با توجه به وجود مکانیزم ضربدری ، سنگین تر هستند .
– قطعات بیشتری داشته در نتیجه به نگهداری بیشتری نیاز دارند .
– تثبیت تنظیم صندلی چرخدار و نیز اصلاح آن بسیار مشکل تر است .
– امکان تطابق کمتری با کاربران دارند[ ۶ ] .
تکیه گاه های دست[۲۵]
تکیه گاه های دست صندلی های چرخدار معمولی ممکن است بخشی ثابت از بدنه و یا از انواع چرخنده به عقب[۲۶] یا جداشونده باشند . تکیه گاه های دست براساس طول بالشتک آن ها در دو نوع ارائه می شوند . طول بالشتک تکیه گاه های دسته میزی[۲۷] کوتاهتر هستند و به کاربر اجازه می دهند که به میز ( تحریر ، غذا و … ) نزدیک تر شود . طول بالشتک تکیه گاه های دست بلند[۲۸] تا جلوی ریلها نشستنگاه کشیده شده و تکیه گاه بلندتری را فراهم می کنند .
ارتفاع تکیه گاه دست می تواند ثابت یا قابل تنظیم باشد . بالشتک تکیه گاه های دست قابل تنظیم در ارتفاع ، امکان تطابق ارتفاع تکیه گاه دست با ارتفاع تنه فرد و تهیه میزان مناسب حمایت از بازوها را فراهم می نماید . قرارگیری یک محافظ در زیر تکیه گاه دست از ساییده شدن لباس و بدن کاربر توسط چرخهای عقب جلوگیری می کند[ ۱ ] .
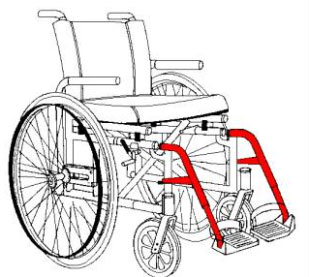
تکیه گاه های ساق
تکیه گاه های ساق[۲۹])شکل ۶) و جاپایی ها[۳۰] از ساق ها و پاها حمایت می کنند و این دو همراه با هم، اغلب به عنوان اسباب جلویی[۳۱] صندلی چرخدار نام برده می شوند . تکیه گاه های ساق ممکن است ثابت ( به صورت یکپارچه با بدنه ) و یا جدا شدنی ( چرخنده به بیرون[۳۲] ) باشند . نوع چرخنده به بیرون جابجایی به و از صندلی چرخدار را آسانتر می نمایند[ ۱ ] .
جاپایی ها به تکیه گاه های ساق متصل هستند و اغلب ارتفاع آنها جهت تطابق با طول ساق فرد، قابل تنظیم می باشد . در برخی انواع، زاویه جاپایی نیز جهت تطابق با زاویه مفصل مچ فرد قابل تنظیم می باشد . با توجه به اینکه تکیه گاه های ساق و جاپایی ها تکیه گاه و حمایت مورد نیاز اندام های تحتانی را فراهم می کنند ، تنظیم صحیح آنها ضرورت دارد[ ۱ ] .
ترمز[۳۳]
یکی از اجزایی که در صندلی های چرخدار معمولی مورد استفاده قرار می گیرد ترمزها می باشند. ترمز چرخ به عنوان ترمز توقف یا پارک عمل مینماید و هنگام جابجایی از روی صندلی چرخدار بر روی سطح دیگر یا زمانی که کاربر مایل است در مکانی خاص توقف نماید، استفاده میشود. با استفاده ترمزها، کاربر میتواند به اشیاء دیگر فشار وارد کند و در زمان دلخواه، ثبات بیشتری داشته باشد. ترمزها در انواع مختلف ارائه میشوند و در محل های مختلف صندلی چرخدار نصب می شوند[ ۱] .
دسته های رانش[۳۴]
دسته های رانش امکان راندن صندلی را از عقب برای فرد همراه امکان پذیر می سازند[ ۱ ] .
وسایل ضد واژگونی
وسایل ضد واژگونی[۳۵] ثبات صندلی را افزایش می دهند و بنا به نیاز در جلو یا عقب یا هر دو سمت نصب می شوند و در هنگام تغییر جهت بردار وزن ، از واژگونی صندلی جلوگیری می کنند . استفاده از این وسایل به ویژه در صندلی های چرخداری که به سامانه های تکیه گاه پشتی خم شونده به عقب (reclining) و نشستنگاه خم شونده به عقب tilt-in-space مجهز شده اند اهمیت دارد .این وسایل ،ثابت یا قابل جدا شدن هستند . مزیت انواع جدا شدنی در امکان جدا کردن یا بالا بردن آنها جهت پیشگیری از مزاحمت آنها در هنگام عبور از جدول خیابانها یا مسیرهای ناهموار می باشد[ ۱] .
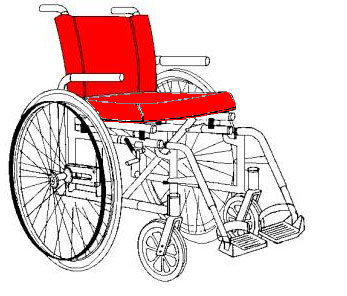
مبلمان[۳۶]
مبلمان نشستنگاه و تکیه گاه پشتی )شکل ۷)معمولاً از جنس پارچه می باشد که به بدنه متصل می شوند . اصلی ترین مزیت استفاده از مبلمان های پارچه ای، سبک بودن و قابلیت تا شدن آنها می باشد که حمل و نقل صندلی چرخدار را آسان می کنند[ ۱] .
ساختار رانش
ساختار رانش در صندلی های چرخدار دستی شامل دو قسمت اصلی می باشد :
۱- چرخها
۲- واسط ] ۲ [
چرخ ها
چرخهای عقب
چرخهای عقب بر دو نوع اصلی هستند . چرخ های سیمی[۳۷] ،دارای پره های فلزی می باشند که محیط طوقه را به توپی چرخ متصل می کنند . چرخ های پرسی[۳۸] از مواد سخت یا کامپوزیت ساخته می شوند .پیش تر این چرخ ها از منیزیوم[۳۹] ساخته می شدند واز آن ها به عنوان چرخ های مگ[۴۰] نام برده می شد . مدل های جدیدتر از آلومینیوم ، نایلون یا مواد کامپوزیت پلاستیکی ساخته می شوند[ ۱ ] .
چرخ های پرسی نیاز به نگهداری کمتری دارند ولی از آنجا که چرخ های پره ای سبک تر هستند بیشتر مورد استقبال کاربران صندلی های چرخدار فعال قرار گرفته اند[ ۲ ] .
قطر چرخ ها از ۴۶ تا ۶۶ سانتی متر متغیر است . صندلی های چرخدار الکتریکی معمولاً دارای چرخ هایی با قطر ۴۶ سانتی متر و انواع دستی معمولی چرخ های ۶۰ سانتی متری دارند[ ۲ ] .
میزان چرخش چرخ ها به صورت راحت و بدون لرزش و تکان تحت عنوان راستی[۴۱] بررسی می شود. راستی چرخ های سیمی به تنظیم کشش پره های چرخ بستگی دارد و باید حداقل سالیانه یکبار برای استفاده معمولی، کنترل شوند . راستی چرخ های مگ در هنگام تولید ثابت شده اند و ثابت باقی می مانند مگر آنکه در معرض دمای بالا یا ضربه قرار بگیرند . تنظیم چرخ ها[۴۲] بر سهولت رانش صندلی چرخدار تأثیر دارند . مقصود از تنظیم چرخ ها میزان موازی بودن دو چرخ با یکدیگر می باشد . در صورتیکه چرخها موازی نباشند ، مقاومت غلتشی آنها در صندلی چرخدار افزایش می یابد[ ۲] .
در صندلی های چرخدار بسیار سبک وسبک امکان نصب محور چرخ های عقب در موقعیت های مختلف نسبت به بدنه وجود دارد که تنوع در عمل رانش را امکان پذیر می سازد .
با بردن محور چرخ های عقب به سمت جلو ، فاصله محور چرخ های عقب با محور چرخک های جلو صندلی چرخدار[۴۳] کاهش و قدرت مانور آن افزایش می یابد و در مقابل امکان واژگونی به عقب صندلی چرخدار افزایش می یابد .
نصب محورچرخ های عقب در موقعیت های خلفی تر ، موجب افزایش پایداری صندلی چرخدار می شود . حرکت محورهای چرخ های عقب به بالا موجب پایین آمدن نشستنگاه و در نتیجه مرکز ثقل می شود و پایداری صندلی چرخدار را افزایش می دهد .
در این شرایط با هر ضربه نیروی جلوبرنده قوی تر خواهد بود . به وضعیتی که محورهای چرخ های عقب به گونه ای نصب شوند که بالای چرخ های عقب به سمت بدنه صندلی چرخدار به یک میزان نزدیک شوند ، کمبر[۴۴] گفته می شود که موجب افزایش سطح اتکاء صندلی چرخدار بر روی زمین می شود . استفاده از پین های سریع آزاد کننده[۴۵] ، امکان جداکردن چرخ ها در هنگام حمل و نقلرا فراهم می نماید[ ۱ ].
دو نوع لاستیک چرخ در صندلی های چرخدار استفاده می شود : بادی[۴۶] و توپر[۴۷] . لاستیک های بادی معمولاً دارای یک تیوپ داخلی قابل تعمیر می باشند .
این لاستیک ها رانشی آسانتر ، سواری با لرزش کمتر و مانور بیشتری را فراهم می کنند . آنها سبک ترین نوع لاستیک ها بوده و حداقل وزن را به کل صندلی چرخدار تحمیل می کنند . بزرگترین عیب آنها ، پنچر شدن و نگهداری سخت آنها می باشد و فشار هوای داخلی آنها باید به صورت مداوم کنترل شود . [ ۶ ]
بنابر مطالعه ساواتزکی[۴۸] و همکاران ( ۲۰۰۴ ) ، لاستیک های توپر عملکردی بدتر از لاستیک های بادی حتی در مواقعی که باد لاستیک های بادی تا ۲۵ درصد کاهش یافته باشد دارند و در واقع مزایای لاستیک های بادی بسیار بیشتر از مزایای لاستیک های توپر ( هزینه پایین تر و نیاز به تعمیر و نگهداری حداقل ) برای کاربران صندلی های چرخدار دستی می باشد . در لاستیک های بادی در صورتی مصرف انرژی به صورت آشکار اضافه می شود که باد آنها تا ۵۰ درصد کاهش یافته باشد [ ۷] .
لاستیک های توپر در سه نوع نیمه بادی[۴۹] ، اسفنجی[۵۰] و سخت[۵۱] ارائه می شوند . برخی تولید کنندگان این لاستیک ها را لاستیک های ضد پنچری[۵۲] می نامند . لاستیک های نیمه بادی شامل یک لاستیک سخت با ساختار پلاستیکی می باشند که یک حلقه فلزی از مرکز آنها می گذرد .
کارایی این لاستیک ها از سایر نمونه ها به لاستیک های بادی نزدیک تر بوده و دارای مقاومت غلتشی کم و تا حدودی دارای خاصیت ضربه گیری[۵۳] می باشند . لاستیک های اسفنجی به جای هوا با اسفنج پر شده اند و کارایی بهتری از لاستیک های جامد دارند . لاستیک های جامد با دوام ترین و ارزان ترین و در مقابل سنگین ترین نوع لاستیک ها هستند که مقاومت غلتشی بیشتری نیز ایجاد می کنند . هیچ کدام ازانواع لاستیک های توپر پنچر نمی شوند . انتخاب نوع لاستیک براساس نیاز کاربر ، زمینه استفاده و میزان دسترسی به خدمات تعمیر و نگهداری معین می شود [ ۲ ] .
چرخک ها[۵۴]
چرخ های جلو در صندلی های چرخدار، چرخک نامیده می شوند . قطر متوسط چرخک ها از ۵۰ تا ۲۰۰ میلی متر متفاوت می باشد. چرخک های بادی حرکت نرم تری را فراهم می کنند ولی به نگهداری بیشتری نیاز دارند . در صندلی های چرخدار بسیار سبک ، از چرخک های از جنس پلی اورتان[۵۵] استفاده می شود . از جمله مهمترین مشکلات چرخک ها لرزش[۵۶] در آنها می باشد . این لرزش هنگام هل دادن سریع یک گاری خرید توسط خریداران تجربه می شود . چرخک های کوچکتر لرزش کمتری ایجاد می کنند و در مقابل چرخک های بزرگتر ، حرکت نرم تری را فراهم نموده ودر عوارض مسیرهای ناهموار کمتر گیر می کنند ] ۱ [ .
واسط فرد/ فناوری[۵۷]
واسط فرد/ فناوری در صندلی های چرخدار دستی معمولاً حلقه ای است که به چرخ متصل می باشد و حلقه رانش[۵۸]نامیده می شود .
حلقههای رانش، حلقههای فلزی یا پلاستیکی هستند که به چرخهای رانش (یعنی چرخهای عقب) متصل میشوند و برای راندن و هدایت یک صندلی چرخدار دستی به کار میروند.
حلقههای پلاستیکی اغلب در صندلیهای چرخدار ارزان استفاده میشوند. حلقه رانش در صندلی های چرخدار معمولی از استیل نوردسرد و آب کروم کاری شده و در صندلی های چرخدار سبک و بسیار سبک ، از آلومینیوم ساخته می شوند و اغلب پوششی از وینیل یا لاستیک متخلخل (فوم) بر روی آن کشیده می شود .
فوم به عنوان روکش حلقه رانش دوام چندانی ندارد و بجز برای افرادی که دست آنها عملکرد خیلی ضعیفی دارد یا در اندام فوقانی درد شدید دارند، به ندرت استفاده میشود. حلقههای رانش با روکش وینیل در جهت افزایش اصطکاک بین دست و حلقه رانش کاملاً مفیدند و به کاهش نیروی لازم جهت راندن صندلی ،کمک میکنند.
نقص عمده روکش وینیل این است که درهنگام پایین آمدن از یک شیب،با افزایش اصطکاک موجب ایجاد گرما میشود . وینیل در توزیع و پخش گرما، بسیار ضعیف عمل میکند. اندازه حلقه رانش بر رانش صندلی چرخدار تأثیر دارد . حلقه های رانش کوچکتر مشابه دنده بالا[۵۹] در دوچرخه، نیاز به قدرت بیشتری برای شروع حرکت دارند ولی دستیابی به سرعت در حین رانش را آسانتر می نمایند و در مقابل حلقه های رانش بزرگتر مشابه دنده پایین در دوچرخه ، شروع حرکت را تسهیل می کنند ولی در حفظ سرعت بالا ،به کار و تلاش بیشتری نیاز دارند .
در افرادی که در گرفتن حلقه های رانش مشکل دارند می توان از الحاق تکمه یا برجستگی هایی که به این منظور طراحی شده اند استفاده کرد .
استفاده از حلقههای رانش دارای برجستگی برای کاربرانی که عملکرد دستهایشان بسیار ضعیف است، مفید میباشد. برجستگیها، نیاز به ایجاد اصطکاک برای راندن صندلی چرخدار را برطرف مینمایند ولی با توجه به اینکه اعمال نیرو بر حلقه رانش را به محیطهایی که برجستگیها قرار گرفته اند محدود می کنند، استفاده از حلقه رانش را مشکل مینمایند .
در سرعتهای بالاتر، ضربه زدن به این برجستگیها ، بسیار مشکل تر میشود و علاوه بر آن این برجستگیها ، قدرت مانور صندلی چرخدار را کاهش میدهند . برخی کاربران جهت بهتر گرفتن حلقه های رانش و محافظت از دستهای خود از دستکش استفاده می کنند [۱،۲،۴،۶ ] .
قطر لوله حلقههای رانش نیز متغیر است. در اغلب صندلیهای چرخدار دستی از لولههای با قطر یک سانتی متر استفاده میشود. این قطر از نظر تولید کنندگان صندلی چرخدار مناسب و مقرون به صرفه است و به همین دلیل از آن به عنوان یک استاندارد غیر رسمی[۶۰] استفاده میشود، هر چند بنا به سفارش مشتری قطرهای بزرگ تر نیز ارایه میگردد.
قطرهای بزرگ تر لوله حلقه رانش (حداکثر تا دو و نیم سانتی متر ) میتواند گرفتن حلقه رانش توسط دست و وارد کردن نیرو بر آن را آسان تر نماید. برای برخی افراد ، قطر بزرگ تر حلقه رانش در صورتی که سایر جایگزینها غیر عمل باشند، مورد توجه قرار میگیرد [ ۱ ] .
در صورتیکه کاربر فقط قادر به استفاده از یک دست باشد ، دو حلقه رانش در سمت سالم نصب می شوند و با استفاده از یک محور، ارتباط بین حلقه درونی و چرخ سمت مقابل برقرار می شود .
کاربر با گرفتن هر دو حلقه رانش و اعمال نیرو بر آنها صندلی چرخدار را به جلو می راند و با استفاده از یک حلقه رانش به طرفین می چرخد .
در نوع اهرمی کاربر برای راندن صندلی چرخدار بر یک اهرم با استفاده از دست سالم نیرو به سمت جلو و عقب وارد می کند که صندلی چرخدار یک دستی[۶۱] نامیده می شود . استفاده از هر یک از دو مکانیسم مذکور به وجود مقدار مناسب از هماهنگی و قدرت کاربر بستگی دارد و فرد می باید نسبت به امکان پذیری[۶۲] استفاده از آنها مورد ارزیابی قرار گیرد[ ۱ ] .
در شکل۸ انواعی از رانش صندلی های چرخ دار دستی با واسط های متفاوت فرد/فناوری نشان داده شده است.
رانش صندلی های چرخ دار
برای پاسخ به نیازهای متفاوت افراد با اختلالات حرکتی ، سه طبقه گسترده از سامانه های حرکتی چرخدار
( صندلی چرخدار ) وجود دارد :
– سامانه حرکتی وابسته[۶۳]
– سامانه حرکتی مستقل دستی[۶۴]
– سامانه حرکتی مستقل الکتریکی[۶۵]
سامانه های حرکتی وابسته توسط فرد همراه رانده می شوند و زمانی انتخاب می شوند که :
۱- فرد هرگز نتواند صندلی چرخدار را به صورت مستقل براند ( مانند افراد مبتلا به کمبودهای ادراکی ، شناختی یا رفتاری )
۲- در شرایطی که به یک سامانه ثانویه که سبک تر است و حمل و نقل آن آسان تر می باشد نیاز وجود دارد
( مانند جابجایی بیماران در فرودگاه )
تأمین قدرت مورد نیاز جهت رانش ، هدایت و کنترل این سامانه ها یا به صورت مستقل توسط فرد همراه صورت می پذیرد و یا رانش و هدایت صندلی چرخدار با استفاده از نیروی الکتریکی انجام می شود و فرد همراه فقط کنترل صندلی چرخدار را بر عهده دارد .
سامانه حرکتی مستقل دستی در افرادی کاربرد دارد که توانایی راندن صندلی چرخدار را به صورت دستی دارا می باشند . این سامانه ها دارای دو چرخ بزرگ در عقب و دو چرخ کوچک در جلو هستند و این امکان را برای فرد فراهم می نمایند که آن را به صورت مستقل براند .
سامانه های حرکتی الکتریکی مستقل زمانی ضرورت می یابند که فرد در راندن صندلی چرخدار دستی مشکل داشته باشد . این سامانه ها ، صندلی های چرخدار موتورداری می باشند که توسط کاربر رانده می شوند .[ ۱،۸]
به طور خلاصه می توان بر مبنای نوع تأمین قدرت مورد نیاز برای رانش ، صندلی های چرخدار را در انواع زیر طبقه بندی نمود :
الف – صندلی های چرخدار دستی که توسط سرنشین آن با بهره گیری از توان فیزیکی خود رانده ، هدایت و کنترل می شوند .
این صندلی های چرخدار دستی به یکی از سه روش زیر رانده می شود :
الف- با یک دست
ب- با دو دست
ج- با پاها [ ۴،۵ ]
ب- صندلی های چرخدار دستی که توسط فرد همراه با بهره گیری از توان فیزیکی او رانده ، هدایت و کنترل می شوند . ( سرنشین صندلی چرخدار به این منظور انرژی مصرف نمی کند )
پ- صندلی های چرخدار الکتریکی که توسط سرنشین آن با بهره گیری از توان الکتریکی رانده ، هدایت و کنترل می شوند .
ت- صندلی های چرخدار الکتریکی که توسط فرد همراه با بهره گیری از توان الکتریکی رانده ، هدایت و کنترل می شوند .
ث-اسکوتر ها که توسط سرنشین با بهره گیری از توان الکتریکی رانده ، ولی هدایت و کنترل وسیله با استفاده از توان فیزیکی او انجام می شود [ ۹ ].
در پیوست ۲ مزایا و معایب صندلی های چرخدار دستی،الکتریکی واسکوتر ها با هم مقایسه شده اند.
رانش صندلی چرخدار دستی
کاربران صندلی های چرخدار دستی به جای اندام های تحتانی از اندام های فوقانی خود برای تحرک استفاده می نمایند . دست ها در مقایسه با پاها ، کارایی کمتری دارند و آسیب پذیرتر می باشند و در نتیجه ، ظرفیت فیزیکی کمتری فراهم نموده و همراه با خط ابتلا به مشکلات استفاده بیش از حد می باشند . این مشکلات علاوه بر درد و عدم راحتی شامل ابتلا به سبک زندگی غیرفعال نیز می باشد که خود می تواند موجب بروز عوارض ثانویه ای چون چاقی ، دیابت و مشکلات قلبی عروقی شود .
تأثیر ساختار حمایتی صندلی چرخدار در رانش صندلی چرخدار دستی
بررسی تأثیر ساختار حمایتی بر بیومکانیک رانش، به ویژه در سی سال اخیر مورد توجه قرار گرفته است . بروبیکر[۶۶] ( ۱۹۸۶ ) ذکر نموده است که بازده رانش[۶۷] به طور چشمگیری تحت تأثیر وضعیت نشستن کاربر بر روی صندلی چرخدار دستی قرار دارد . تغییر در وضعیت نشستنگاه برزمان ضربه ، زمان بازیافت و زاویه ضربه تأثیر دارد.[ ۱۰ ]
عدم تطابق ابعاد و اندازه های صندلی های چرخدار با کاربران آنها در کارایی صندلی چرخدار تأثیر منفی بر جای گذاشته و در برخی موارد می تواند موجب آسیب در فرد شود . بخشی از این مشکل می تواند به چگونگی ارتباط دادن ابعاد فرد با ابعاد صندلی چرخدار باز گردد .
عرض کم تکیه گاه پشتی صندلی چرخدار موجب عدم راحتی فرد می شود و عرض زیاد آن بر توانایی رانش کاربر اثر منفی می گذارد . چنانچه فاصله بین دو تکیه گاه دست زیاد باشد ، کاربر مجبور خواهد بود تا برای قرار گرفتن حلقه های رانش ، بازوهای خود را در وضعیت خم شده به جلو[۶۸] قرار دهد . در این شرایط ، حلقه زدن و راندن صندلی چرخدار به جلو توسط کاربر ، شبیه به بال زدن جوجه[۶۹] خواهد بود .
در صندلی های چرخدار دستی اختلاف بیش از ۳ سانتی متر ، بین عرض نشستنگاه صندلی با عرض لگن ، اثر منفی بر بیومکانیک ضربه[۷۰] ( اعمال نیرو بر حلقه های رانش ) دارد .
هر چه عرض نشستنگاه صندلی چرخدار کمتر باشد ، عرض کلی صندلی چرخدار کمتر شده، دسترسی به ساختمانها و فضاهای محدود افزایش می یابد .
همچنین عرض کمتر نشستنگاه صندلی چرخدار ، چرخهای عقب را در وضعیت مطلوب تری نسبت به دستان کاربر قرار داده ، موجب افزایش بازده رانش صندلی چرخدار و کاهش خطر ابتلا به درد و جراحت ناشی از استفاده طولانی مدت از صندلی چرخدار می شود(شکل های ۹و۱۰و۱۱و۱۲و۱۳) .وزن صندلی چرخدار بر تحرک کاربر آن تأثیر می گذارد . به طور کلی ، هر چه وزن صندلی چرخدار کمتر باشد ، بهتر است . وزن کم صندلی چرخدار، راندن ، بارگیری و عبور از موانع را تسهیل می کند . [ ۳،۱ ]
راجرز[۷۱] و همکاران ( ۲۰۰۰ ) در مطالعه ای با هدف مقایسه تأثیر سبک رانش صندلی چرخدار دستی که در آن کاربر در وضعیت flexion تنه قرار دارد با وضعیتی که تنه در وضعیت خنثی می باشد به این نتیجه رسیدند که وضعیت flexion تنه در حین رانش می تواند منجر به آسیب به اندام فوقانی کاربران گردیده و بر کارایی فیزیکی و کیفیت زندگی آنان تأثیر بگذارد [ ۱۱ ].
بنابرمطالعه ریشتر[۷۲] ( ۲۰۰۱ ) تغییر موقعیت نشستنگاه[۷۳] کاربر بر روی صندلی چرخدار با تغییر طول بردار بین مرکز چرخ عقب با شانه های کاربر به صورت مستقیم بر زاویه رانش[۷۴] تأثیر دارد . کاهش این فاصله موجب افزایش زاویه رانش ، کاهش بسامد ضربه ، کاهش گشتاور شانه و افزایش گشتاور باز شدن[۷۵] آرنج می شود[ ۱۲].
آیسائو[۷۶] و همکاران ( ۲۰۰۲ ) در مطالعه ای تحت عنوان « بیومکانیک رانش صندلی چرخدار دستی در سالمندان : زوایای tilt و recline » به این نتیجه رسیدند که خم کردن به عقب نشستنگاه صندلی چرخدار تا ۱۰ درجه زاویه tilting و خم کردن به عقب تکیه گاه پشتی صندلی چرخدار به میزان ۱۰ درجه موجب افزایش قابل ملاحظه راندمان مکانیکی فرد تا ۱۰ درصد می شود . تأثیر زاویه tilt در افزایش راندمان مکانیکی به طور قابل ملاحظه ای بیشتر از زاویه recline بدست آمد[ ۱۳ ].
هر چند بنابر مطالعه دسروچس[۷۷] و همکاران با استفاده از ارگومتر ( شکل ۱۴ ) ( ۲۰۰۶ ) تغییر زاویه نشستنگاه ( به صورت title یا recline ) با ثابت نگهداشتن موقعیت محور چرخ عقب نسبت به شانه کاربر ، بر میزان بار[۷۸] وارده بر شانه کاربر ، تأثیر معنی داری ندارد و بر این اساس می توان زاویه نشستنگاه صندلی چرخدار را براساس راحتی کاربر و مدیریت توزیع فشار بین سطح تماس نشیمنگاه کاربر و نشستنگاه صندلی چرخدار ( جهت پیشگیری از بروز زخم فشاری ) تعیین و تنظیم نمود . [۱۴ ]
تریولو[۷۹] و همکاران در طی مطالعه ای با هدف بررسی تأثیر تحریک عضلات باز کننده کمری[۸۰] از طریق FES بر بیومکانیک رانش به این نتیجه رسیدند که ثبات دهی تنه با استفاده از FES موجب بهبود رانش صندلی چرخدار دستی می شود . فعال کردن عضلات پشت ، امکان خم شدن به جلو را برای کاربر مهیا نموده ، در نتیجه موجب افزایش نیروهای مؤثر مکانیکی می شود . [ ۱۵ ]
کاتاجاروی[۸۱] و همکاران ( ۲۰۰۴ ) در مطالعه ای با هدف بررسی تأثیر موقعیت نشستنگاه بر بیومکانیک حلقه رانش به این نتیجه رسیدند که فاصله کمتر بین محور چرخ های عقب با شانه های کاربر صندلی چرخدار موجب بهبود زمان ضربه[۸۲] و متغیرهای واقع در صفحه پیشانی می شود و نیروهای محوری و شعاعی در وضعیت فوق حداکثر می باشد . [ ۱۶ ]
تأثیر ساختار رانش بر رانش صندلی چرخدار دستی
ساختار رانش شامل چرخ ها ، چرخک ها و واسط فرد/فناوری می باشد . این اجزاء در طرح ها و ساختارهای متفاوت با توجه به فرد کاربر ، زمینه مورد استفاده و فعالیت مورد نظر ( چون راندن صندلی چرخدار دستی به عنوان یک مسابقه ورزشی یا جهت انجام فعالیت های روزمره ) طراحی ، ساخته و ارائه می شود .
علاوه بر تأثیر این اجزاء ساختاری بر رانش صندلی چرخدار دستی، نحوه ترکیب و تنظیم این اجزاء نیز بر رانش صندلی چرخدار دستی تأثیر به سزایی دارد .
چرخ ها و چرخک ها امکان رانش صندلی چرخدار را فراهم می نمایند . مقصود از چرخ ها در صندلی های چرخدار دستی خودران ، چرخ های بزرگ عقب می باشد که تحت عنوان چرخ های رانش[۸۳] نیز از آنها نام برده می شود و چرخک ها ، چرخ های کوچک جلو می باشند که چرخ های هدایت[۸۴] نیز نامیده می شوند .
در این نوع از صندلی های چرخدار اعمال نیرو از طریق واسط ( معمولاً حلقه های رانش ) بر چرخ ها صورت می پذیرد که موجب رانش صندلی چرخدار می شود و با توجه به میزان تفاوت نیروی وارده بر چرخ های سمت چپ و راست کاربر ، چرخک ها با چرخش محور دوشاخه خود در صفحه افقی ، هدایت ( مانور و چرخش به طرفین ) صندلی چرخدار را تسهیل می نمایند .
در صندلی های چرخدار دیگرران معمولاً اعمال نیرو از طریق فرد همراه بر دسته های رانش از طرف پشت بر صندلی چرخدار صورت می پذیرد . در این نوع ، دسته های رانش به عنوان واسط فرد/فناوری عمل می نمایند و در صورتی که سرنشین صندلی چرخدار فقط توسط فرد همراه رانده شود نیازی به وجود چرخ های بزرگ عقب نخواهد بود و استفاده از چرخ های عقب با قطر کمتر رانش و مانور صندلی چرخدار را آسانتر خواهد نمود .
ویژگی های مختلف چرخ ها و چرخک ها از جمله ویژگی های لاستیک آنها ، نصب و تنظیم آنها ، قطر ، جنس ، و نوع آنها و کمبر چرخ های عقب بر کیفیت و کارایی رانش صندلی چرخدار دستی تأثیر دارد که به برخی از آنها در بخش ساختار رانش اشاره شده است . بونینگر[۸۵] و همکارانش ( ۲۰۰۰ ) طی مطالعه ای با هدف تعیین اثر موقعیت محور چرخ عقب نسبت به شانه بر بیومکانیک رانش نتیجه گرفتند که :
– موقعیت محور چرخ عقب نسبت به شانه در صفحه افقی به صورت آشکاری با بسامد رانش و نرخ صعود برآیند نیرو ارتباط دارد .
– موقعیت محور چرخ عقب نسبت به شانه ، هم در صفحه افقی و هم در صفحه قائم به صورت معنی دار با زاویه ضربه[۸۶] در سرعت های متفاوت ارتباط دارد .
ایشان استنتاج کردند که موقعیت محور چرخ عقب نسبت به شانه کاربر با صدمات عصب median ارتباط دارد و تحویل و تنظیم صندلی چرخداری که امکان تنظیم محور چرخ های عقب آن با توجه به شرایط کاربر را دارا باشد ، موجب بهبود بیومکانیک رانش و کاهش احتمال خطر ابتلا به صدمه می گردد . [ ۱۷ ]
تأثیر اجزاء نرم افزاری فناوری صندلی های چرخدار دستی در رانش آنها
کیفیت رانش صندلی چرخدار دستی و آگاهی کاربر آن به روش های کارا در این زمینه و عمل به آنها در کارایی رانش صندلی چرخدار تأثیر دارد .
با هدف طبقه بندی الگوهای ضربه[۸۷] کاربران صندلی چرخدار دستی و تعیین بیومکانیک الگوهای متفاوت ، بونینگر و همکاران ( ۲۰۰۳ ) مطالعه ای را در دانشگاه پیتزبورگ انجام دادند و دریافتند :
– معمول ترین الگوی مورد استفاده در کاربران در فاز بازیابی، بالا آوردن دست ها در بالای حلقه رانش می باشد .
– الگوی ضربه مستقل از موقعیت محور چرخ عقب است و در سمت چپ و راست و در سرعت های مختلف ، متفاوت می باشد .
– بین الگوهای ضربه در آهنگ و زمان ضربه به زمان فاز بازیابی ، تفاوت های معناداری وجود دارد .
– در الگوهای ضربه ای که مسیر نیم دایره ای دارد و دست ها در خلال فاز بازیابی در پایین حلقه های رانش قرار دارند ، آهنگ ضربه پایین تر و زمان صرف شده در فاز ضربه به فاز بازیابی بیشتر است . ایشان نتیجه گرفتند :
– الگوهای نیم دایره در رانش صندلی چرخدار شکل( ۱۵) توأم با کاهش تکرار و رانش مؤثرتر می باشد و استفاده از این سبک می تواند موجب کاهش صدمه به اندام فوقانی شود .
– متخصصین بالینی می باید به مهارت آموزی کابران صندلی های چرخدار در سبک رانش توجه نمایند . [ ۱۸ ]
هونگ ون[۸۸] و همکاران در مطالعه ای به مقایسه عوامل سینماتیک و سینتیک در دو تکنیک متفاوت رانش ( push-pull و pumping ) پرداختند و به نتایج زیر رسیدند :
– حداکثر بازده مکانیکی به صورت معنی دار در تکنیک push-pull بیشتر از تکنیک pumping می باشد . این تفاوت در میانگین بازده مکانیکی معنی دار نبود .
– دامنه حرکتی مفاصل ( بجز چرخش تنه ) در دو تکنیک مزبور تفاوت معنی دار داشتند .
– استفاده از تکنیک pumping موجب افزایش بار بر اندام فوقانی می شود که منجر به افزایش خطر ابتلا به آسیب اندام فوقانی می شود هر چند بازده مکانیکی رانش را افزایش نمی دهد .
ایشان در خاتمه ذکر نمودند که استفاده از تکنیک pumping برای کاربران جدید صندلی چرخدار مناسب نمی باشد . [ ۱۹ ]
بنابر مطالعه بونینگر و همکاران ( ۲۰۰۳ ) که با هدف بررسی ارتباط بین نیروهای وارده بر حلقه های رانش و پیشرفت آسیب های شانه در کاربران صندلی های چرخدار دستی انجام شد ، احتمال خطر ابتلا به آسیب های شانه با بزرگتر شدن نیروهای وارد بر حلقه های رانش افزایش می یافت . نویسندگان این مطالعه پیشنهاد نمودند تا متخصصین به کاربران تکنیک های مؤثر رانش را آموزش دهند تا با کاهش مقدار نیروهای وارده، امکان آسیب به شانه کاهش یابد . [ ۲۰ ]
بنابر مطالعه بونینگر و همکاران ( ۲۰۰۴ ) ، عملکرد عصب median و ulnar در کاربران صندلی چرخداری که دامنه حرکتی مفصل مچ آنها در حین رانش صندلی چرخدار دستی بیشتر است بهتر است . این کاربران نیروی کمتری بر حلقه های رانش اعمال می نمایند و تعداد ضربه های وارده بر حلقه های رانش در آنان نیز کمتر است لذا در شیوه رانشی که در آنها طول زمانی فاز ضربه بیشتر و ضربه ها به صورت آرام و یکنواخت وارد می شود ، امکان صدمه ندیدن عصب فوق بیشتر است . [ ۲۲ ]
راجرز و همکاران ( ۲۰۰۱ ) با هدف مقایسه ویژگی های بیومکانیکی و فیزیولوژیکی رانش صندلی چرخدار در پیش و پس از مهارت آموزی[۸۹] در کاربران صندلی چرخدار مشاهده نمودند که تحمل فعالیت های تقویتی ، زاویه extension آرنج ، دامنه حرکتی flexion/extension شانه و تنه ، گشتاور رانشی حلقه رانش ، گشتاور extension مچ افزایش و بسامد ضربه کاهش می یابد .
ایشان نتیجه گرفتند که برنامه های مهارت آموزی موجب بهبود رانش صندلی چرخدار دستی بدون افزایش تنش وارد بر اندام فوقانی می شود و در پیش گیری از ابتلا به آسیب های ناشی از استفاده بیش از حد مؤثر می باشند . [ ۲۳ ]
براساس مطالعه بوگنوت[۹۰] و همکاران ( ۲۰۰۳ ) بر روی تأثیر برنامه مهارت آموزی با استفاده از ارگومتر صندلی چرخدار[۹۱] بر ظرفیت کاری[۹۲] و متغیرهای وابسته به ریه و قلب[۹۳] بیماران ضایعه نخاعی ، بهره گیری از مهارت آموزی با ارگومتر صندلی چرخدار موجب بهبود ظرفیت کاری تا ۴۴% بدون تغییر در نرخ ضربان قلب می شود و سطح سازگاری[۹۴] و ظرفیت تحمل[۹۵] بیماران را بهبود می بخشد . [ ۲۴ ]
استفاده مکرر از ساختار عضلانی نامتقارن [ عضلات قدامی تنه و عضلات خلفی تنه ] موجب صدمات ناشی از استفاده از صندلی چرخدار می شود و برنامه تمرینی که موجب افزایش تقارن عضلانی شود موجب کاهش وقوع چنین صدماتی می شود . [ ۲۵ ]
رانش صندلی های چرخدار دستی خودران با استفاده از حلقه های رانش
معمول ترین صندلی چرخدار مورد استفاده در بین کاربران صندلی های چرخدار ( ۹۰ درصد از کل کاربران ) ، صندلی های چرخدار دستی می باشد که حلقه های رانش ( handrim , pushrim یا push/hand ) به عنوان واسط فرد/فناوری عمل می کند . با وجود آنکه حلقه های رانش مهمترین واسط بین کاربر صندلی چرخدار با صندلی چرخدار می باشد در طی ۵۰ سال گذشته کمترین نوآوری و تغییر در طرح حلقه های رانش ایجاد شده است . تداوم استفاده از حلقه های رانش ناشی از طراحی ساده ، آسانی استفاده ، هزینه پایین و نیاز به تعمیر و نگهداری پایین آنها بوده است . با این وجود بسیاری از کاربران صندلی های چرخدار دستی ذکر نموده اند که حلقه های رانش معمولی نیاز آنها را برای یک رانش مؤثر پاسخگو نمی باشد . بنابر مطالعات صورت پذیرفته و بیومکانیک رانش ، کاربران صندلی های چرخدار دستی به طور متوسط ۲۵۰۰ بار در یک روز بر حلقه های رانش ضربه وارد می کنند و در صورتیکه روزانه به طور متوسط ۴۵ دقیقه صندلی چرخدار را برانند در هفته ۱۷٫۵۰۰ بار و در ماه کاربر ۷۵٫۰۰۰ بار این کار را انجام می دهد . حداکثر نیروی رانش حدود ۴۵ تا ۱۱۰ نیوتن برآورد شده است
[ ۲۶ ].
در رانش صندلی های چرخ دار دستی، هر ضربه پیش برنده ای[۹۶] را که کاربران صندلی چرخدار بر حلقه های رانش وارد می کنند به دو فاز تقسیم می شود : فاز ضربه[۹۷] و فاز بازیابی[۹۸] . فاز ضربه مرحله ای است که دستان کاربر در تماس با حلقه های رانش است و فاز بازیابی مرحله ای است که دستان کاربر با حلقه های رانش تماس ندارند و فرد خود را برای ضربه بعدی آماده می کند [ ۲۷ ].
فاز ضربه دارای دو قسمت است :
الف- تماس دست
ب- عمل رانش یا انتقال و استقرار در وضعیت مکانی جدید
شروع این فاز ، تماس دست با حلقه رانش برای اعمال نیروی محرکه است . در لحظه تماس دست بدون اینکه از پیشروی صندلی چرخدار ممانعت شود ، مچ باز شده و آرنج در وضعیت خم شدن و شانه در حالت خم شدن و بالا رفتن قرار می گیرد .
در این مرحله عضلات دلتوئید قدامی و سینه ای بزرگ فعال می شوند تا به طور هماهنگ و موزون شانه را در وضعیت خمیده نگه دارند . در ابتدا عضله دو سر بازو در حرکت خم شدن آرنج شرکت می کنند و باز کننده های مچ نیز با حرکت بر مسیر انحنای حلقه رانش ، دست ها را برای تماس آماده می کنند .
عضله خم کننده انگشتان نیز در این عمل فعال می شود . همچنین عضلات مچ در آغاز تماس با حلقه رانش فعال می شوند . در مرحله رانش ، دست ها با حرکت خود نیروی لازم را برای حفظ گشتاور اعمال می کنند . در آغاز این مرحله دست ها در در وضعیت پایین و عقب همراه با گرایش به خط میانه بدن قرار می گیرد که با خم شدن سریع شانه ها توام می باشد . در این میان خم شدن مفصل آرنج نیز در ایجاد نیروی لازم به حلقه رانش کمک می کند . هنگامی که دست ها از طرفین به سمت حلقه رانش نزدیک می شوند از خط میانه بدن عبور کرده و جلو می روند . حرکت باز شدن آرنج نیز در اعمال نیرو به حلقه رانش نقش مؤثر داشته و مچ سریعاً حرکات باز و بسته شدن را انجام می دهند .
فاز بازیابی نیز شامل دو قسمت است : رها کردن دست و بازیابی مؤثر
در بخش اول دست از نقطه تماس با حلقه رانش رها می شود ، بطوری که این عمل نباید تأثیر منفی بر سرعت حرکت صندلی چرخدار بگذارد . در لحظه آزاد شدن دست ، شانه در حالت تا شدن قرار دارد و مفاصل آرنج و مچ شروع به باز شدن می کنند . در هنگام بازیابی عضلات ذوزنقه ای ، دلتوئید میانی و خلفی و خم کننده های مچ برای خنثی کردن اثر نیروی مؤثر بر حلقه رانش فعال می شوند . بعد از جدا شدن ، حرکت دست ها در سراسر فاز بازیابی ادامه می یابد . این عمل به وسیله حرکات بالا رفتن و باز شدن شانه صورت می گیرد ، ضمن اینکه آرنج به تدریج خم شده و مچ در وضعیت باز شدن قرار می گیرد .
میزان فعالیت عضلات هنگام فاز بازیابی نسبت به مرحله رانش بطور قابل توجهی کاهش می یابد . این نکته ناشی از دو عامل اصطکاک زمین و جاذبه است . در مرحله رانش دست ها در ابتدای حرکت در برابر نیروهای جاذبه مقاومت می کنند .
در بخش دوم ، مهمترین عضله فعال دلتوئید خلفی است که باعث باز شدن شانه می شود . عضلات ذوزنقه ای بالایی نیز در حرکت بالا بردن شانه شرکت می کنند . احتمال می رود میزان اختلاف در ابعاد حلقه رانش در بالا بردن شانه مؤثر باشد بطوری که هر اندازه قطر حلقه رانش کوچکتر باشد نیاز کمتری به بالا رفتن شانه می باشد تا دست برای تماس با حلقه رانش آماده گردد [ ۲۸ ].
رانش صندلی چرخدار به این روش کاری بسیار تکراری است که به طور عمده توسط اندام فوقانی انجام می شود و موجب اعمال فشار اضافی بر مفاصل شانه می شود که از نظر کالبد شناختی برای تحمل چنین باری در مدت زمان طولانی طراحی نشده است(شکل ۱۶) ]۲۹ [ . در واقع حلقه های رانش جهت تطابق راحت با دستان کاربر طراحی نشده اند . سطح تماس حلقه های رانش با دست بسیار اندک است و محلی برای قرارگیری انگشت شست بر روی آن وجود ندارد و فاصله موجود بین حلقه رانش و چرخ های عقب موجب گیر کردن انگشتان بین آنها و پره های چرخ می شود . در صندلی چرخدار معمولی بازده مکانیکی رانش بسیار کم و بین ۸/۱۳-۲ درصد( حدود ده درصد ) براساس سطح ضایعه ، تکنیک رانش و سختی عمل[۹۹] می باشد . [۳۰،۳۱،۳۲ ]
رانش صندلی چرخدار ، روشی پر فشار از تحرک برای سامانه قلبی تنفسی و سامانه اسکلتی عضلانی می باشد و مستلزم به کار بردن اندام های فوقانی در کلیه فعالیت های روزمره زندگی است . کارایی اندام های فوقانی در رانش صندلی چرخدار در مقایسه با کاربرد اندام تحتانی در حرکت معمول بسیار کمتر است و مستلزم تلاش بیشتر می باشد و در نتیجه به ظرفیت کاری[۱۰۰] کمتری منجر می شود .[۳۲ ]
به طور خلاصه می توان عوامل مؤثر در کاهش بازده مکانیکی در رانش صندلی های چرخدار دستی را در موارد زیر ذکر نمود :
۱- جهت تداوم حرکت با صندلی های چرخدار دستی ، کاربر مجبور است به طور متناوب بر حلقه های رانش ضربه وارد نماید و جهت این کار باید به طور متناوب حلقه های رانش را گرفته و رها نماید . این فرایند باید در محدوده ای خارج از میدان بینایی و سریع انجام شود و نیاز به هماهنگی بالایی دارد .
۲- در طی گرفتن و رها کردن حلقه های رانش در خلال حرکت ، تطابق سرعت دست ها با سرعت حلقه های رانش مشکل بوده و تفاوت سرعت بین دست ها و حلقه های رانش موجب اعمال یک نیروی منفی ( اثر ترمزی ) بر حرکت صندلی چرخدار می شود . این اثر ترمزی به ویژه زمانی که کاربر در حس ، هماهنگی یا کنترل موتوری اختلال داشته باشد ، بیشتر آشکار می گردد .
۳- در خلال فاز ضربه کاربر باید نیروی بزرگی را در مدت زمان بسیار کوتاهی ( بین ۲/۰ تا ۶/۰ ثانیه و به طور کلی نیم ثانیه ) تولید نماید و از سویی دیگر موقعیت اندام فوقانی در حین این عمل در شرایط ایده آل نبوده و به ثبات مفصلی قابل توجهی در شانه ، کتف ، مچ و دست نیاز می باشد . ( مطالعات گسترده نشان داده اند که گرفتن اشیای کوچک[۱۰۱] نه تنها در آغاز CTS مؤثر می باشد بلکه در تشدید درد ناشی از CTS[102] نیز مشارکت می نماید . لذا گرفتن حلقه های رانش در صندلی های چرخدار دستی ، می تواند در تشدید درد CTS مؤثر باشد) . [ ۳۳ ]
۴- اعمال نیرو بر حلقه های رانش به صورت افقی بالاترین مزیت مکانیکی را در پی خواهد داشت . ولی از سویی دیگر، آناتومی شانه و در نتیجه آن جهت اندام فوقانی در حرکت ضربه بر حلقه های رانش، اعمال نیرو فقط به صورت افقی را امکان پذیر نمی نماید .
رانش صندلی چرخدار همراه با سایر تنش های وارده بر اندام فوقانی ( چون جابجایی از صندلی چرخدار به سایر سطوح و بالعکس ) می تواند منجر به آسیب در مفاصل مچ ، آرنج و شانه شود.
بنا بر پژوهش های انجام شده شیوع این آسیب ها در بین کاربران صندلی چرخدار ۵۷ درصد می باشد . احتمال بروز این آسیب ها با توجه به سطح ضایعه و طول زمان پس از ضایعه افزایش می یابد . [ ۳۴،۳۵، ۳۶ ]
مشکلات ناشی از استفاده طولانی مدت از صندلی چرخدار دستی به درد و عدم راحتی محدود نگردیده به یک سبک زندگی غیرفعال از نظر فیزیکی منجر می گردد که به دنبال خود می تواند چاقی ، دیابت و مشکلات قلبی- عروقی را به دنبال داشته باشد[ ۳۲،۳۷ ].
در یک پیمایش در سال ۱۹۹۴ با مشارکت ۱۱۷ کاربر صندلی چرخدار تنها ۳۹ درصد کاربران صندلی چرخدار خود را با استفاده از حلقه های رانش می راندند . ۵۴ درصد ازحلقه رانش و تایرچرخ های عقب و ۷ درصد از تایر چرخ های عقب برای این منظور استفاده می کردند .
به عبارت دیگر ۶۰ درصد از کاربران از رانش صندلی چرخدار صرفاً با استفاده از حلقه های رانش راضی نبوده اند[۳۸]. در مطالعات انجام شده در خصوص بیومکانیک رانش صندلی چرخدار نیز تطابق ضعیف دست ها با حلقه های رانش را عامل کاهش بازده رانش صندلی چرخدار و عامل بالقوه آسیب رساننده به مچ و شانه دانسته اند.
بحث و نتیجه گیری
کاربران ، کارشناسان و محققین ، رانش صندلی چرخدار را حوزه ای می دانند که به پیشرفت فناوری در آن نیاز می باشد .در دهه گذشته تغییرات اندکی در طراحی صندلی های چرخدار دستی انجام شده است . صندلی های چرخدار دستی سامانه های پیچیده ای هستند و طراحی صندلی های چرخدار بر تحرک ، استقلال و دسترسی کاربر آن تأثیرگذار می باشد . بررسی رانش صندلی چرخدار دستی به دلیل رشد جمعیت استفاده کننده از صندلی چرخدار و درخواست آنها مبتنی بر داشتن وسیله حرکتی مؤثر برای حفظ کیفیت زندگی برابر با جامعه عادی ، به طور فزاینده ای اهمیت یافته است . تلاش های متعددی جهت بهبود رانش صندلی های چرخدار دستی چون تغییر در چرخ ها و تایرها ، اضافه کردن چرخ دنده ها[۱۰۳] و طراحی سامانه های جایگزین رانش صورت پذیرفته است ولی هنوز کاربران و کارشناسان اعتقاد به نوآوری در رانش صندلی های چرخدار دستی دارند . [ ۳۹ ]
سه دلیل نیاز به پیشرفت در فناوری رانش صندلی چرخدار دستی عبارت اند از :
۱- افزایش استقلال کاربران : طی موانعی چون شیب ها ، آستانه درها ، مسیرهای ناهموار ، فرش و مسیرهای طولانی که به صورت روزمره کاربران صندلی چرخدار با آن مواجه هستند به قدرت و تحمل بیشتری نیاز دارد . بهبود فناوری های رانش ، با کاهش خستگی و افزایش قدرت مانور موجب افزایش استقلال کاربران در فعالیت های روزمره می شود .
۲- فواید فیزیکی برای کاربران : استفاده طولانی مدت یا نادرست از صندلی چرخدار دستی منجر به آسیب های ناشی از وارد آمدن فشارهای مکرر[۱۰۴] چون rotator cuff tears و carpal tunnel syndrome می شود .
درد و آسیب اندام فوقانی در بین کاربران صندلی های چرخدار دستی شایع می باشد . آسیب های شانه در بیش از ۵۱ درصد از کاربران صندلی های چرخدار دستی و علاوه بر آن شیوع درد در مفاصل آرنج ، مچ و دست به ترتیب ۱۶% ، ۱۳% ، ۱۱% گزارش شده است.
شیوع carpal tunnel syndrome و rotator cuff tendonitis در کاربران صندلی چرخدار دستی بیش از ۵۰ درصد ( در مقایسه با ۳ درصد در جامعه عادی ) می باشد.
در خلال رانش صندلی چرخدار دستی کاربر می بایست نیروهای بزرگی را بر حلقه رانش اعمال کند و این در حالی است که نیروی وارده توسط کاربر به صورت کامل صرف جلو راندن صندلی چرخدار نمی شود ، بلکه بخشی از آن برای برقراری اصطکاک بین دست ها و حلقه های راتش مصرف می شود .[ ۴۰ ]
بیش از ۵۰ درصد کاربران صندلی چرخدار ضایعه نخاعی به درد و آسیب اندام های فوقانی مبتلا شده اند و در غالب مطالعات رانش صندلی چرخدار را به عنوان یک علت این مسئله شناخته اند .
در مطالعات مقطعی شیوع درد شانه در افراد مبتلا به ضایعه نخاعی بین ۳۱ تا ۷۳ درصد و شیوع CTS 49 تا ۷۳ درصد گزارش شده است . در کلیه این مطالعات نویسندگان اظهار نموده اند که ترومای تکراری ناشی از رانش صندلی چرخدار و جابجایی از و بر آن تا اندازه ای عامل این آسیب ها می باشند . در یک مطالعه شیوع درد معنی دار در اندام فوقانی افراد تتراپلژی ۵۹ درصد و در افراد پاراپلژی ۴۱ درصد گزارش گردید . [ ۴۱،۴۲ ]
مطالعات نشان داده اند که حرکات تکراری حین رانش صندلی چرخدار دستی ، دو مشکل اساسی ایجاد می نماید که موجب کاهش کیفیت زندگی می شود : درد و از دست دادن عملکرد . عمده ترین شکایت ها شامل درد شانه ناشی از rotator cuff degeneration و از دست دادن عملکرد دست در اثر سندروم تونل کارپال ( CTS ) می باشد . خستگی عمومی شکایت عام دیگر می باشد . در برخی از افراد و به ویژه در کوادری پلژی و کسانی که مدت زیادی از ضایعه نخاعی آنها می گذرد این مشکل می تواند به از دست دادن بخشی یا کل ظرفیت فرد در رانش مؤثر صندلی چرخدار شود . [ ۴۳ ،۳۰ ، ۳۳ ]
کاربران صندلی چرخدار به جراحات فیزیکی متعدد مبتلا می شوند[ ۴۴ ] . مطالعات اخیر ثابت کرده اند که کاربران صندلی های چرخدار با توجه به الگوی تکراری حلقه زدن در معرض جراحات استفاده بیش از حد[۱۰۵]
به ویژه در نواحی شانه ، آرنج و مچ قرار می دهد . سایر جراحات و شرایطی که کاربران صندلی چرخدار با آن مواجه می شوند . عبارتند از : کمردرد ، خستگی ، سوختگی دست ها به وسیله حلقه رانش ، کثیف شدن لباس ها ، کثیف شدن دست ها ، عرق کردن و گرمازدگی . اغلب این صدمات از استفاده بیش از حد یا استفاده غلط از عضلات شانه ، بازو و دست ها ناشی می شود.
پیامد درد در اندام فوقانی کاربران صندلی های چرخدار عبارتند از :
– از دست دادن استقلال در نتیجه افزایش فشار بر مراقبین
– کاهش فعالیت و در نتیجه آن ابتلا به عوارض اجتماعی و روانی
– کاهش کیفیت زندگی
– افزایش هزینه های سلامت
– ابتلا به ناتوانی های ثانویه
– به طور خلاصه آسیب های ناشی از صندلی چرخدار در مفاصل اندام فوقانی عبارتند از :
– شانه با شیوع ۳۱ تا ۷۵% شامل Impingement ، rotator cuff pathology ، distal clavicle osteolysis ، premature joint degeneration
– درد آرنج با شیوع ۱۶ تا ۳۵ درصد شامل Tendonitis
– درد مچ با شیوع ۱۳ تا ۷۴ درصد شامل Carpal tunnel syndrome
– درد مچ با شیوع ۱۵ تا ۴۳ درصد [ ۴۵]
بنابر مطالعه بونینگر و همکاران که با هدف بررسی درد گردن[۱۰۶] در کاربران صندلی های چرخدار صورت گرفت مشخص گردید که شصت و شش درصد از گروه کاربران صندلی چرخدار مورد بررسی در این مطالعه از زمانیکه کاربر صندلی چرخدار شده اند به درد گردن مبتلا شده اند و ۶۰% از آنها در طی یک ماه پیش از مطالعه درد گردن داشته اند . ۶۰% از این افراد به این دلیل به پزشک مراجعه نموده اند و فعالیت روزمره ۴۰% از آنها به علت این درد ، محدود گردیده است . [ ۴۶ ]
۳- جمعیت زیاد کاربران صندلی های چرخدار دستی : در سرتاسر جهان برآورد می شود ۱۰۰ تا ۱۲۰ میلیون نفر فرد ناتوان به صندلی چرخدار نیاز داشته باشد ، هر چند کمتر از ده درصد از این افراد به یک صندلی چرخدار دسترسی دارند .[۴۷] اگر چه این ارقام مورد تردید قرار دارند ، کارشناسان پیش بینی می کنند که تعداد افراد نیازمند به صندلی چرخدار طی ده سال آینده ، ۲۲ درصد افزایش خواهد یافت .
در سال ۱۹۹۴ در ایالات متحده از حدود ۶/۱ میلیون نفر کاربر صندلی چرخدار فقط ۱۶۰ هزار نفر از صندلی چرخدار الکتریکی استفاده می کردند [ ۴۸] .
در صورتی که توان فیزیکی فرد پاسخگوی انجام فعالیتی معین با صندلی چرخدار دستی نباشد فرد ناچار به استفاده از صندلی چرخدار الکتریکی یا ترک آن فعالیت خواهد بود .
صندلی های چرخدار الکتریکی بسیار سنگین تر از انواع دستی هستند که موجب ایجاد محدودیت در قابلیت حمل و نقل آنها گردید ، اغلب به سامانه حمل و نقل ویژه ( قابل دسترس برای معلولین ) یا خودرو Van می باشند . انواع الکتریکی صندلی های چرخدار دارای ابعاد بزرگتری نیز بوده و در نگهداری آنها در محیط های بسته مانند خانه محدودیت ایجاد می نمایند و از سویی دیگر موجب تقویت تداعی و تصویر ناتوانی در فرد می شوند .
یا این وجود نیاز به انجام یک فعالیت می تواند موجب انتقال یک فرد از استفاده از صندلی چرخدار دستی به صندلی چرخدار الکتریکی شود و یا کاربر با توجه به فعالیت و شرایط محیط از یکی از دو وسیله مذکور استفاده نماید که حالت دوم خود موجب پیچیده تر شدن شرایط و افزایش هزینه می شود . [ ۴۵ ]
صدمات مرتبط با استفاده از صندلی چرخدار موجب تحمیل هزینه بر شرکت های بیمه و کاربران و در نهایت جامعه می شود . [ ۴۹ ]
وود[۱۰۷] سه استراتژی زیر را جهت غلبه بر ناکارایی رانش صندلی های چرخدار دستی با استفاده از حلقه های رانش پیشنهاد نمود :
– حداکثر نمودن کارایی صندلی چرخدار و واسط فرد/فناوری
– بهبود ساختار و کارایی فیزیولوژیکی فرد
– تغییر روش رانش
که در این طرح پیشنهاد سوم به صورت خاص مد نظر می باشد .
در پرتو دانش بیومکانیکی و فیزیولوژیکی رانش صندلی چرخدار دستی نیاز به پرداختن به روش هایی بجز رانش با حلقه های رانش ، احساس می شود . ] ۵۰ [